
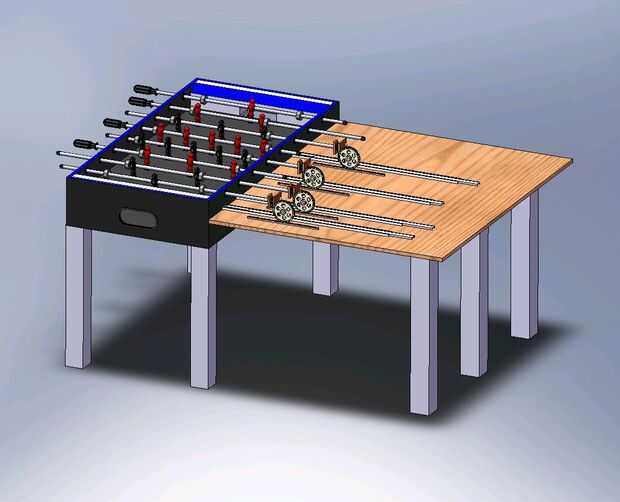
> Ocho servomotores utilizados para manipular las asas de la mesa de futbolín
> Un microcontrolador para activar los servos y comunicarse con la computadora
> Una encima de la cabeza montada webcam para seguir la pelota y los jugadores
> Un ordenador para procesar las imágenes de la webcam, implementar inteligencia artificial y comunicarse con el microcontrolador
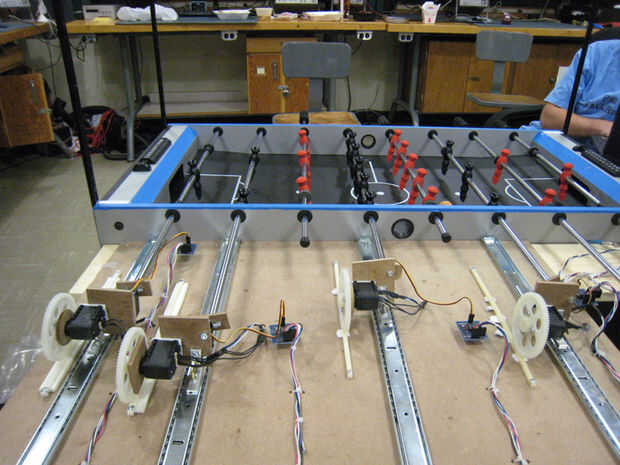
Restricciones de presupuesto para el prototipo redujo el proyecto algunos y mantuvieron su funcionalidad al mínimo. Motores adecuados a los jugadores se mueven a una velocidad competitiva fueron encontrados para ser muy costoso, para que servos de menor tuvieron que ser utilizada.
Mientras que esta implementación particular fue limitada por el costo y el tiempo, una mayor desmultiplicación rendiría un robot jugando más rápido, aunque ello costaría más que el precio base de $500 (precio sin fuente de alimentación y equipo).

")



![3D impreso Sumobot [autónoma RC, Multiplayer Bluetooth]](https://foto.askix.com/thumb/170x110/c/58/c58e3803baa24b310292be19feb85290.jpg "3D impreso Sumobot [autónoma RC, Multiplayer Bluetooth]")




")
")
")
