Paso 6: electrónica





Proyecto Big Bird requiere dos circuitos, cada uno con funciones especializadas:
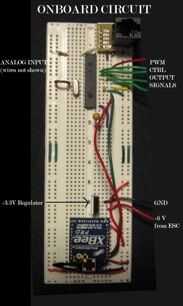
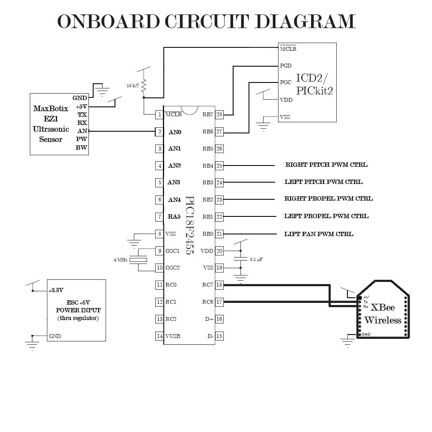
Circuito PIC a bordo:
enviar y recibir datos desde el host PIC vía wireless
controla el ventilador de elevación y los ventiladores de propulsión a través de señales de salida PWM
Lee sensores (convertir de analógico a digital)
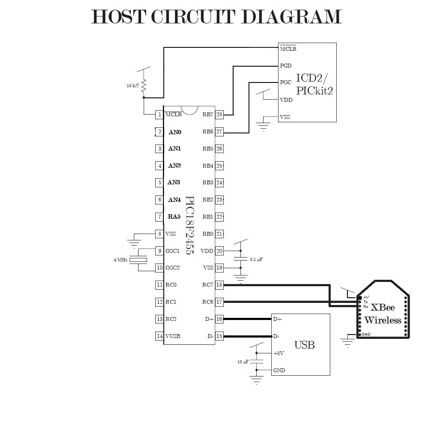
Circuito PIC de host:
enviar y recibir datos desde el ordenador vía USB
enviar y recibir datos con host PIC vía wireless
A continuación se muestran fotos de ambos.
Esquemas de los circuitos también aparecen por debajo de
Energía
A bordo:
Toma + 6V de potencia Novak Electronic Speed Control (ESC)
Funciona completamente en + 3,3 v, producida por un regulador de voltaje
Anfitrión:
Se ejecuta en + 5V de ordenador
Usos de módulo XBee + 3,3 v, producida por un regulador de voltaje
Microcontroladores (PICs)
Decidimos utilizar microcontroladores de la Microchip Technologyâ? €™ familia s PIC18F debido a nuestra experiencia previa y disponibilidad. La hoja de datos para esta clase de microcontroladores se puede encontrar aquí.
Electrónicamente, estas fotos se requieren entre 2.5-5.5 V, bien dentro de la gama de ambos circuitos.
Módulo inalámbrico
Para lograr la transferencia de datos inalámbrica entre el ordenador y la elevación a bordo y los ventiladores de propulsión, elegimos utilizar un XBee Pro OEM RF módulo, como se muestra a continuación
El XBee proporciona una solución de bajo costo, de bajo consumo para la comunicación inalámbrica. Ofrece un rango de 300 pies una frecuencia 802.11 estándar. El dispositivo está listo para operar fuera de la caja con un circuito de un apoyo mínimo. A continuación se muestra un diagrama de pines
Los pines 1 y 10 deben conectarse a + 3, 3V y GND, respectivamente. Pin 2, la XBeeà ¢ â â ¢ s nodo de salida de datos, se conecta al pin 18 de cada PIC. Del mismo modo, los datos de XBee de entrada, el pin 3, ganchos en a pin 17 del PIC. Estas cuatro conexiones son todo lo necesario para enviar y recibir bytes de datos inalámbrica entre PICs.
Para más información sobre el módulo XBee OED RF, consulte la hoja de datos del fabricante.
Electrónica del ventilador de elevación
Gran Birdà ¢ â â ¢ s ventilador de elevación es un Novak GTB/SS 10,5 Pro sistema sin escobillas, que incluye el motor, el control de velocidad y otros componentes necesarios.
Este sistema requiere 4.8-7.2 V para que funcione, que a medida que la tensión de entrada el desempeño motor acerca a 7.2 V.
La elevación de ventilador systemà ¢ â â ¢ s variador electrónico (ESC) proporciona un + 6V potencia junto con el cable de señal blanca que proporciona un control PWM del ventilador de elevación. Esto + 6V fue regula a + 3, 3V y utilizado para alimentar el circuito a bordo.
Decidimos poder gran Birdà ¢ â €™ sistema de ventilador de elevación ¢ s con un 7.2V batería de polímero de litio de equipo Orion carbono edición 2 celdas.
La elección del polímero del litio para el tipo de batería permite tiempo considerablemente más largo y un peso más ligero que otras opciones, como las NiMH (níquel Metal hidruro). La densidad de energía de estas baterías, así como su disponibilidad son por qué salimos con estas baterías.
Para más información sobre el sistema de control de Motor de Novak GTB, visite este enlace.
Las especificaciones de la batería equipo Orion pueden encontrarse aquí.
Electrónica de hélice
Para proporcionar empuje hacia adelante y hacia atrás a Big Bird, optamos por utilizar 2 sistemas de motor sin escobillas Electri-mosca anular M 22-1000.
Estos motores ofrecen un control de paso variable de las palas de la hélice, lo que nos permite cambiar rápidamente entre adelante, atrás, girar y comportamientos en reposo a una velocidad constante del motor. Control de paso variable evita el desgaste excesivo de los motorà ¢ â â ¢ s componentes mecánicos y también evita que la electrónica de batería y un motor de propulsión de experimentar demasiada variabilidad en el voltaje y cargas actuales, que son claramente ideales de vida prolongada.
Las especificaciones de motor anular indican que el dispositivo pueda funcionar entre 7.2 y 12 V, aunque nuestra experiencia mostró que el alcance efectivo era más como V 9-12.
Las especificaciones para el motor anular pueden encontrarse aquí.
Para poder anular el motor óptimo (a 12 V como sea posible para lograr el mayor potencial de empuje), decidimos utilizar un 11,1 V 3 celdas Li-Po batería de Hi-Model, se muestra a continuación
Puede encontrarse más información sobre esta batería aquí.
Entrada ultrasónica
Para proporcionar una prueba de sensor de concepto para la plataforma de Big Bird, decidimos añadir un sensor de distancia por ultrasonidos con el prototipo final. Basado en bajo costo, disponibilidad y facilidad de plug-and-play de uso, elegimos utilizar el sensor de ultrasonidos Maxbotix EZ1, que se muestra a continuación
El EZ1 requiere 2,5 à ¢ â â € 5,5 V, y para nuestra implementación fue desarrollada usando los 3.3V energía del circuito a bordo. Este ¢ sensorà que â especificaciones de â ¢ s indican que ofrece ~6.4 mV/en análoga a esta tensión, un factor que se encontró de acuerdo con el bien observado valores.
A continuación se muestra el diagrama de pines de este sensor
Conectamos el Pin 1 GND y el Pin 2 al + 3.3V del circuito a bordo.
La sensorà ¢ â â ¢ s Pin 5 (AN) proporciona voltaje analógico salida escalado a la lectura de distancia. Conectamos este pin al AN0 en el PIC a bordo, donde se convierte en una lectura digital y enviada inalámbricamente al ordenador para la exhibición.
La hoja de datos de este sensor de ultrasonidos se encuentra aquí.
Mientras que el sensor no tiene actualmente ninguna parte integral en el desempeño de Big Bird, creemos que ofrece una agradable prueba de concepto para gran Birdà ¢ â sensor de s de ¢ â potencial. Con 5 entradas analógicas (AN0 à ¢ â â € AN4) disponible en el PIC a bordo, existen un montón de opciones futuras para el control de navegación con las modificaciones de código apropiado.







")
")



")
