Paso 4: El código
El código fue adoptado de otro instructivo escribió: regla ultrasonidos Pocket-Sized. Que utiliza la misma lógica para encontrar la distancia con el SR HC-04 como que instructable, pero he añadido un bloque de declaraciones de "if" y la lógica para el "motor".
Nuestro código puede dividirse en tres partes:
1. el programa de instalación (y en el indicador)
2. hallazgo de distancia
3. el bloque "if"
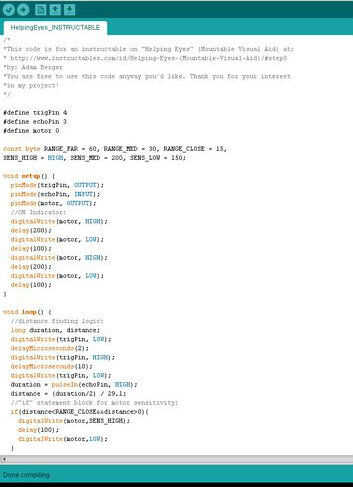
Al principio del código, verá las declaraciones de nuestras variables (que pueden variar según preferencias personales). Hay nuestras variables RANGE_FAR, RANGE_MED y RANGE_CLOSE, (que define los límites de la distancia de un objeto) y SENS_HIGH, SENS_MED y SENS_LOW, (que definen la sensibilidad será el motor de la C.C. cuando se traspasan los umbrales). Entonces en nuestra función de configuración, que llamamos la función pinMode() para asignar salidas o entradas y enviar algunos pulsos de voltaje positivo a nuestro motor de la C.C. a nuestro usuario el dispositivo es "on".
Como se mencionó antes, la distancia encontrar lógica (en la función loop()) es similar a un anterior instructable. Es mejor solo créeme que este código devuelve la distancia (en centímetros) para que poder procesar más adelante.
Propósito del bloque "if" es comprobar si nuestra distancia cruza cualquiera de nuestros tres umbrales: RANGE_FAR, RANGE_MED o RANGE_CLOSE. Si atraviesa uno de esos umbrales, se le enviará un ciclo de trabajo para el motor de la C.C. igual a o la variable SENS_HIGH, SENS_MED o SENS_LOW. (255 es un ciclo de trabajo completo y 127 es el ciclo de trabajo 50%). Han hecho todas estas variables constantes, no dude en cambiar sus valores según lo que quiere su umbral de distancia y sensibilidad para ser.




")







")
