Paso 6: Montaje de la caja de electrónica
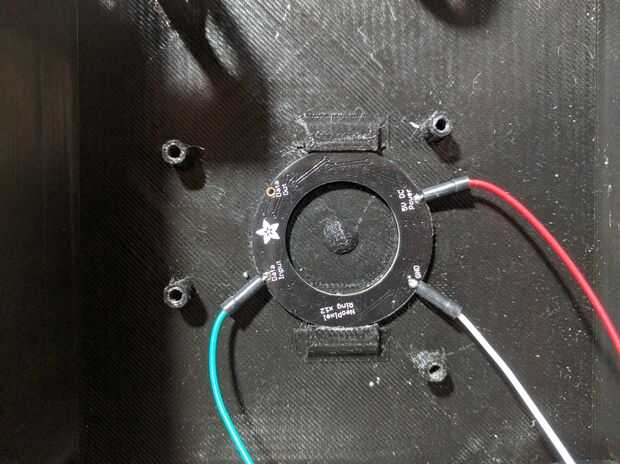











1) Presione el aro entre los cierres en la parte inferior de la caja para mantener en su lugar.
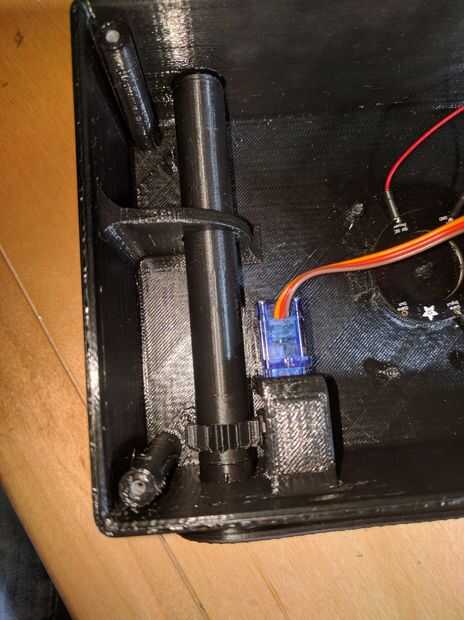
2) Coloque el soporte de la batería montada en su cavidad.
3) soldar el cable de tierra con el interruptor On/Off.
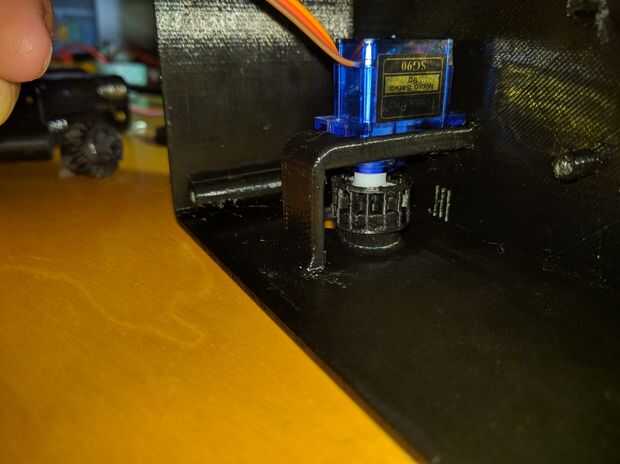
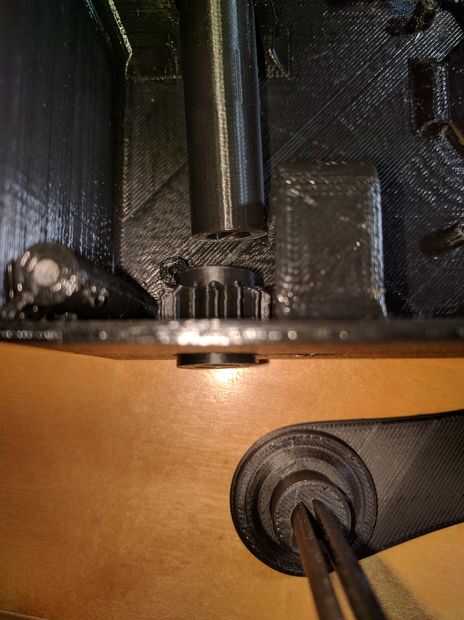
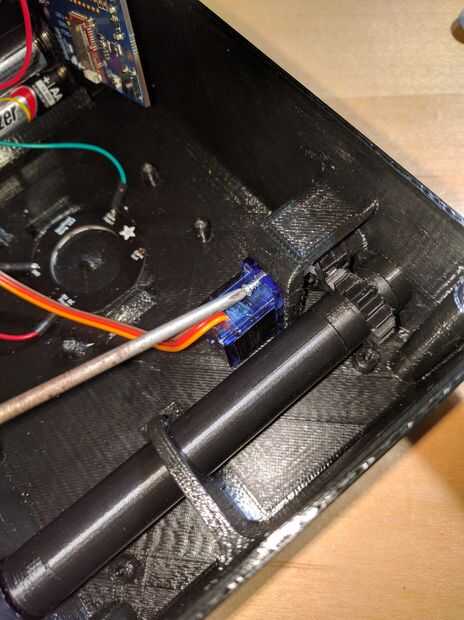
4) Coloque su equipo servo montado en el cilindro para que la cabeza del tornillo enfrenta a la parte delantera de la caja.
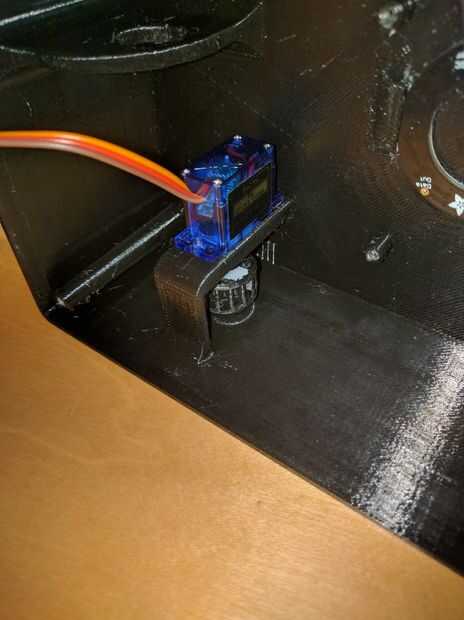
5) montar el Servo en el rectángulo en el otro lado del engranaje del servo para que el servo y servo cuerno ajuste juntos.
6) Utilice el orificio en la parte frontal de la caja para el engranaje servo el servo.
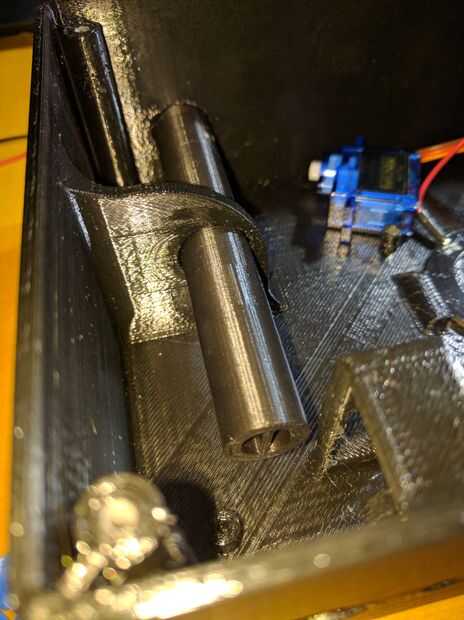
7) Coloque el eje de la palanca en el agujero grande en la parte frontal de la caja para que el extremo abierto del eje al frente de la caja. Empuje el eje hacia la parte posterior de la caja hasta que no puede ir más lejos.
8) Coloque la parte del engranaje de la palanca entre el orificio grande y el eje de modo que el extremo corto quede hacia la parte delantera de la caja.
9) ahora empuje la base de la palanca a través del agujero grande en el frente de la caja que se acopla a las demás piezas de la palanca.
10) Coloque un tornillo en el orificio superior en el servo para fijarlo en su lugar.
11) Coloque el tapón sobre el agujero pequeño en el frente de la caja para darle una mirada más limpia.
12) Coloque cinta de doble cara entre los 2 orificios en la tapa.
13) diapositiva ahora los cilindros del sensor de la distancia a través de los orificios para que la cinta de doble cara se adhiere al sensor de distancia.
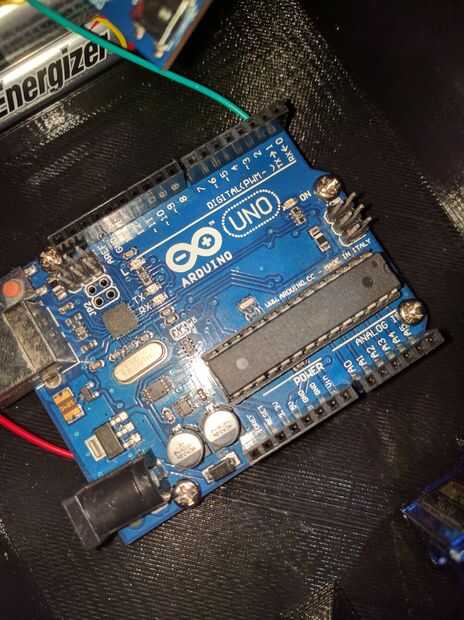
14) ahora utilice 4 tornillos para montar el Arduino. (Nota: Asegúrese de que ha enviado el programa a arduino antes de realizar este paso, como podrá reprogramar una vez que está instalado.)
15) una vez montado el Arduino, coloque el escudo de Bluefruit LE en la parte superior y realizar las conexiones en el paso anterior de la Asamblea de circuito.








. Planos gratis kayak bricolaje, la ferretería barco")