Paso 11: Programa el Roverbot
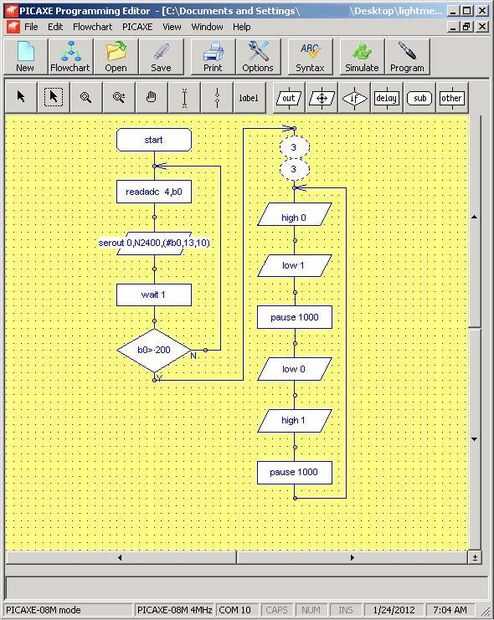
La forma más sencilla de describir lo que hace este programa es espera para el nivel de luz en la habitación para llegar a una cierta intensidad y una vez que la luz nivel es alcanzada, el programa suplentes cambio rover de derecha e izquierda motores de encendido y apagado. Esto resultará en la rover, girar a la derecha, luego izquierda, luego derecha, luego a la izquierda, ad infinitum. Esto es lo que parece el código básico:
' BASIC convertido de diagrama de flujo:
' C:\Documents and Settings\Desktop\lightmeter1.cad
' Convertido en 25/01/2012 en 6:10:25
principal:
label_6: ' b0 es menos de 201
readadc 4, b0 ' obtiene el valor de b0 del pin 4 (cantidad de luz que incide en el sensor RP)
serout 0,N2400,(#b0,13,10) ' valor de b0 (cantidad de luz que incide en el sensor RP) a la programación de terminal serie del editor
espera 1 ' espera un segundo antes de proceder
Si b0 > 200 entonces label_51 ' si valor de b0 > 200 (si brillo de la luz en el sensor RP alcanza nivel elegido, roverbot comienza bailando
Goto label_6 ' luz no es brillante lo suficiente así que, tome otra lectura
label_51:
label_27:
alto 0 ' interruptor izquierda motor roverbot
baja 1 ' apagar motor derecha roverbot
PAUSE 1000 ' derecha motor gira durante un segundo
bajo 0 ' apaga el motor izquierdo
High 1 ' interruptor motor derecho en
PAUSE 1000 ' derecha motor gira durante un segundo
Goto label_27 ' repetir hasta que se apague danza danza Roverbot
El "readadc 4 b0" proceso lee el valor del convertidor de analógico a digital en el pin 4 y asigna ese valor a b0 que los valores posibles son de 0 a 255 dependiendo de la cantidad de luz que incide sobre la fotorresistencia (RP) conectado al pin 4 en el PICAXE.
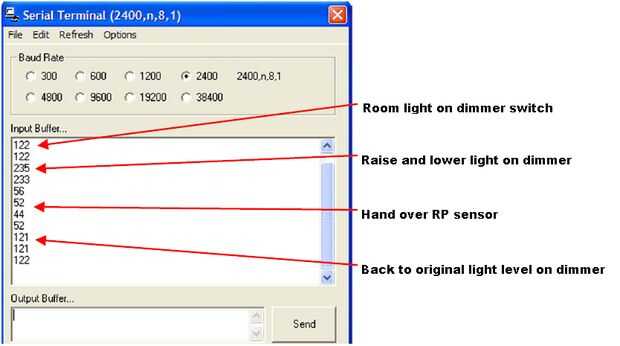
El "serout 0,N2400,(#b0,13,10)" entrada/salida no es necesaria para el ejecución del programa. He insertado para poder probar los niveles de luz en la sala del Editor de programación Serial Terminal y ajustar el programa en consecuencia. Al convertir el diagrama de flujo básico y programar el PICAXE presionando la tecla F8 para mostrar el Terminal Serial. En la foto puedes ver que he probado los niveles de luz en una habitación con un interruptor más dévil en la luz.
El proceso de "espera" indica al programa que espere un segundo antes de proceder al siguiente paso. En el Terminal de serie del Editor de programación vi los valores aparece una vez cada segundo.
El "si b0 > 200 entonces label_51" decisión diamante dice que si el valor asignado a b0 es mayor de 200 goto el siguiente paso en el programa de lo contrario ir a proceso "readadc 4, b0". Si nos fijamos en la imagen de la Terminal de serie ¿qué crees que sucedió cuando planteé el nivel de luz usando el atenuador y el valor de b0 saltó de 122 a 235?
La entrada/salida "alta 0" dice el PICAXE para configurar pin 0 alta. Con esto iniciará el motor del lado izquierdo en el explorador para comenzar a girar hacia adelante.
La entrada/salida "baja 1" dice el PICAXE para fijar el perno 1 bajo. Esto le dirá el motor del lado derecho en el rover que deje de girar.
La entrada/salida "bajo 0" dice el PICAXE para configurar pin 0 baja. Esto le dirá el motor del lado izquierdo en el rover que deje de girar.
La entrada/salida "alta 1" dice el PICAXE para fijar el perno 1 alta. Con esto iniciará el motor del lado derecho en el explorador para comenzar a girar hacia adelante.
Para ejecutar el programa, asegúrese de que ajustar circuitos Deslice el interruptor S1 se enciende más el programa se ejecutará mientras que todavía está descargando el programa para el PICAXE y accidentalmente puede desconectar el cable de programación si el nivel de luz en el sensor RP hace que devuelven un valor superior a 200 causando roverbot a bailar. A continuación, asegúrese de que esté encendida el Snap circuitos 9 voltios Batería bloque B5 o el programa no se descargará en el PICAXE. Conecte el Snap circuitos programación Cable USB a su ordenador.
1. Conecte el cierre amarillo a la S broche de presión en el bloque de circuitos Snap 8 Pin Socket U14 (el portador del chip PICAXE).
2. Conecte el broche rojo para el cierre de salida de S en el bloque de circuitos Snap 8 Pin Socket U14 (el portador del chip PICAXE).
3. Conecte el broche negro a la GND o negativo (-) presión en el bloque 8 del perno zócalo U14 (el portador del chip PICAXE).
Antes de continuar tienes que cubrir el sensor de la RP con el dedo.
En el Editor de programación PICAXE, haga clic en y luego haga clic en ejecutar. Se mostrará una barra de estado para mostrar el progreso de la descarga del programa para el PICAXE.
Al finalizar el programa descargando, desconecte el cable de programación del ordenador y de danza danza Roverbot. Coloque el Roverbot en el suelo una distancia segura de cualquier obstáculo. A continuación, deslice el interruptor S1 interruptor a on. Cuando estés listo para ver la danza de su Roverbot, lentamente retirar su dedo el sensor RP. Cuando cae suficiente luz en el sensor para establecer el valor de b0 a 201 la danza danza Roverbot será empezar a girar a la derecha, luego a la izquierda, luego a la derecha, luego izquierda (una versión robótica de la torcedura), hasta que se apague el interruptor deslizante.











")

