




www.renanwebsites.com.br
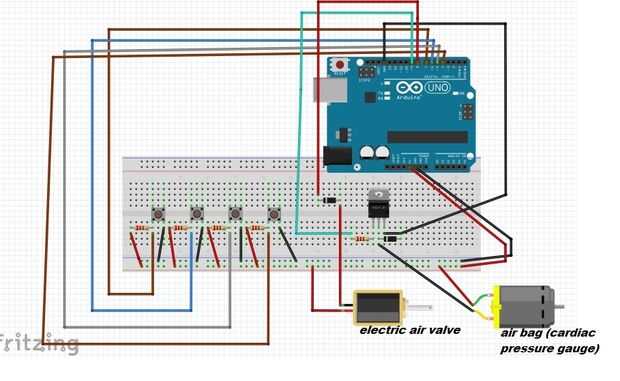
Este es mi primer proyecto con arduino, la idea es llenar una bolsa de aire y controlar su altura desde el piso, esto es un proyecto se puede implementar en mayor escala, vamos a seguir el esquema y transferencia de código para el Arduino:
componentes:
1 x motor manómetro mitsumi
1 x transistor de propósito General (TIP 31C)
1 x bolsa de aire (medidor de presión cardiaca)
1 x válvula de aire eléctrico
x x cables (puentes)
4 botones de presión
2 diodo genérico (1N4407)
resistencias de ohm 4 220
1 Arduino uno
1 protoboard
Código:
/ * suspencao un ar
criado por: Renan jinete
datos: 01/08/2014
*/
motor int = 9;
int valv = 8;
int button_ar = 7;
int button_valv = 6;
int button_ar_all = 5;
int button_valv_low = 4;
void setup() {}
Serial.Begin(9600);
pinMode (motor, salida);
pinMode (valv, salida);
pinMode (button_ar, entrada);
pinMode (button_valv, entrada);
pinMode (button_ar_all, entrada);
pinMode (button_valv_low, entrada);
}
void loop() {}
int estado_ar = digitalRead(button_ar);
int estado_valv = digitalRead(button_valv);
int estado_ar_all = digitalRead(button_ar_all);
int estado_valv_low = digitalRead(button_valv_low);
Serial.println(estado_ar);
Serial.println(estado_valv);
Serial.println(estado_ar_all);
Serial.println(estado_valv_low);
Delay(10);
if(estado_ar == High) {/ / para de depois de la segundos "por 3 ar enche o balao de"
digitalWrite (valv, HIGH);
digitalWrite (motor, HIGH);
Delay(3000);
digitalWrite (motor, baja);
}
if(estado_valv == High) {/ / aciona un valvula de ar esvaziando o balao para ajustar una correta de altura
digitalWrite (valv, LOW);
Delay(1000);
digitalWrite (valv, HIGH);
digitalWrite (motor, baja);
}
if(estado_valv_low == High) {/ / esvazia todo o balao abaixando un suspencao
digitalWrite (valv, LOW);
digitalWrite (motor, baja);
}
if(estado_ar_all == High) {/ / aciona o motor enchendo o balao comió una altura maxima por 6 segundos depois manten una altura
digitalWrite (valv, HIGH);
digitalWrite (motor, HIGH);
Delay(6000);
digitalWrite (motor, baja);
}
}
Video:
http://www.youtube.com/watch?v=Jg5-kPuDQrg





 vía Labview(+Arduino)")


")



