(Nota, tenemos una nueva versión de este proyecto en este Instructable)
Usted puede probar este proyecto vivo en el sitio
El desafío
Así, el desafío es tomar un servo hobby y 2-3 pies de movimiento lineal fuera de él. ServoCity trabaja en servo actuadores lineales, pero nos prefieren una energía más baja, más barato y llegar ya que actualmente ofrecen (aunque los nuevos pueden ser pendientes). También creamos un arreglo de tipo SCARA básico con 3" lazy susans, servos y contrapesos. Esto funciona OK, pero el espacio de trabajo era limitada, y en virtud de la polar con servos de hobby, la resolución es desigual - mayor más cerca de los servos. Esto no puede ser un gran problema, pero el enfoque se muestra a continuación da la misma precisión sobre el espacio de trabajo completo. También podríamos considerar un híbrido - usando un brazo rotatorio con un deslizador de trazador de líneas: las matemáticas sería fácil que utilizaría directamente coordenadas polares. También podríamos invertir los dos - utilice el deslizador lineal y añadirle un brazo giratorio. Un proyecto para otro día!
Utilizando Servos de Hobby
Con un Servo de Hobby, por lo general llegar a 90 o 180 grados de rotación, así que el truco es conseguir que funcione durante un período más largo - 2-3 pies. Podríamos modificar un servo para rotación continua, pero entonces pierdes la capacidad de posicionamiento y nos gustaría mantener el enfoque interno de circuitos y potenciómetro de PID. Si utiliza el potenciómetro interno y añadir un cuerno del servo grande, usted podría conseguir una amplia gama de viajes. Con un cuerno circular, la distancia recorrida es Pi * diámetro de la bocina 2 - que finalmente dividir por dos es para tener en cuenta el máximo de 180 grados de recorrido (nos pondremos en eso más adelante). Por lo tanto, para un recorrido de 2', se necesita un cuerno del servo con un diámetro de más de 15"! Podríamos utilizar este enfoque con un lazy susan tipo de configuración, pero el ímpetu en las móviles que mucho material pone una gran tensión mecánica en los servos (el mismo problema que tuvimos con el prototipo SCARA). Otro enfoque es a la salida, para que pueda obtener más movimiento en la salida. No cavar en esto y puede haber problemas con la potencia necesaria para mover los engranajes, y además, utilizar un engranaje es un ticker de poco mecánicamente - surgió con un enfoque mucho más simple.
Así, para nuestro sistema, nos tiró el potenciómetro de la caja de servo y lo reemplazó con un potenciómetro de 10-vuelta. Así que, enseguida, se multiplica la distancia recorrida por 10, por lo que para este caso, toma el diámetro del cuerno para un 2' de 15" hasta 1,5" - mucho más razonable!
En términos de acoplamiento de la salida podríamos conducir un eje de rosca con una tuerca de seguidor (rosca ACME parece preferible). Esto parece ser el mecanismo más común para homebrew tablas XY - debido a su potencia y precisión. Resultar en viaje más lento, sin embargo y una vez más, un montón de engranaje para conseguir el potenciómetro para moverse a la velocidad adecuada para cubrir el lapso del viaje.
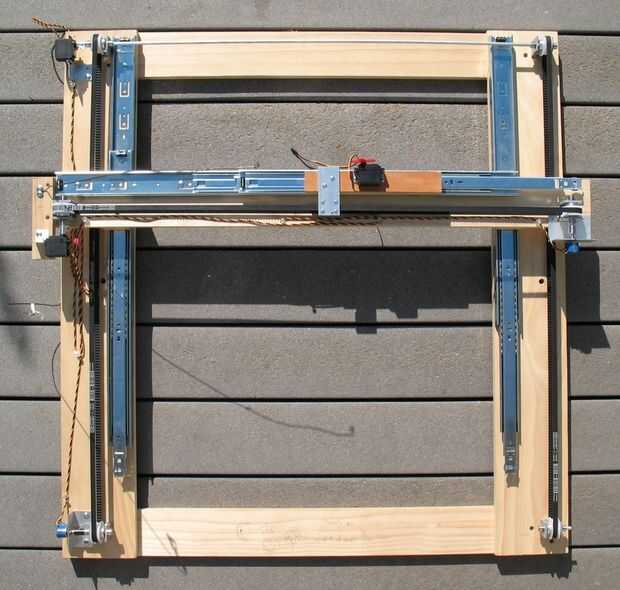
Lo que optamos por fue un enfoque de correa de sincronización muy sencilla donde el servo conduce una polea de correa dentada, y el potenciómetro de 10-a su vez está conectado directamente al eje. Con este arreglo simple, entonces, tenemos 2-3' de viaje en unos cuantos segundos con los no mecánicos complejos. Usted podría escalar este enfoque por engranaje abajo el coche o el potenciómetro a los límites de la mecánica de un servo hobby.













