Paso 6: Modificar los Servos de rotación continua y eliminar el potenciómetro

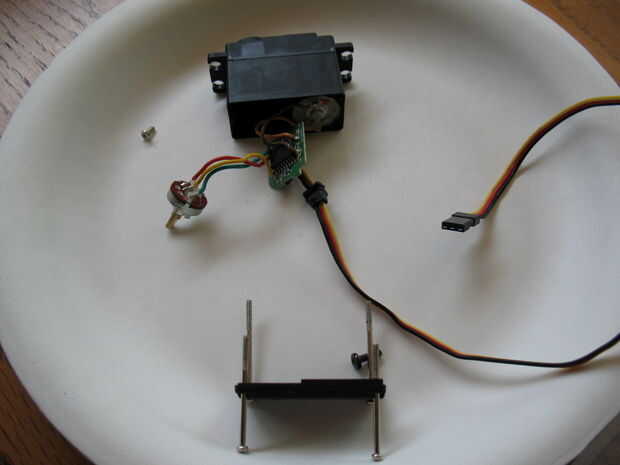
En ambos casos, también cortamos la lengüeta limitadora en el engranaje principal. Utilizamos una herramienta Dremel para esto - pero tenemos que limpiar bien después de eso.
(Junio de 2009) Tenga en cuenta que para el eje Y (el que está en la parte superior), el motor servo está funcionando bien, pero para el eje X, hemos tenido algunos problemas. Por lo que el sistema actual está utilizando un
Pololu regulador del Motor de 3A con la regeneración y un Reductor Motor de la C.C. de 12VDC de 250 RPM. La Junta de chip funciona como un tablero de control de servo, y ya tenemos el potenciómetro externo. El motor es mucho más robusto y ha estado trabajando bien. Un problema menor es que el algoritmo PID a veces delata un poco, pero no es demasiado, y la Junta Directiva le permite configurar las constantes del PID - sólo necesitan tiempo para retoques. :-) También puede utilizar un tablero servo y adaptarse para el mismo uso, vamos a ver en en algún momento también.













