Paso 3: Construir

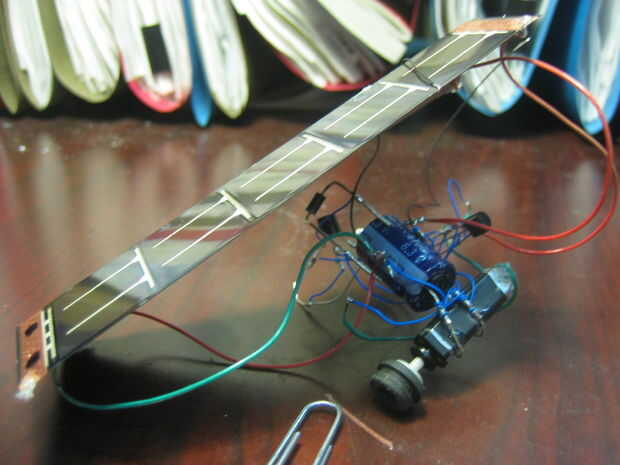
El motor está detenido por las patas del condensador grande, y las dos patas traseras del robot son sólo las piernas dobladas del condensador más pequeño. El neumático es una cosa gomosa offset desde el mismo CD-walkman que el motor de. Los desplazamientos ayudan a reducir la vibración en viejos reproductores de música portátiles.
Este robot es bastante cutre, era sólo una prueba de concepto. Tiene sin sensores y un solo motor, pero pueden agregarse más/motores/sensores de potencia una vez que consigues un buen trabajo de base y obtener la sensación para todo.
Este es un buen recurso para estos tipos de robots:
http://www.solarbotics.net/Library/Circuits/se_t1_mse.html
Aquí es un libro bueno y barato en este tipo de robótica:
Libro de robótica de la viga













