


Aquí es cómo construir un piloto automático que puede dirigir un RC barco a waypoints! Es fácil de construir, basado en la popular plataforma Arduino e ideal para aficionados que quieren alguna soldadura práctica! Con este piloto automático, un barco RC puede ir a largas distancias sin intervención humana, como un robot autónomo. La idea original era imitar barcos robóticos como el UBC Sailboty el Scout (que casi superado con éxito su travesía transatlántica!)
Este proyecto ha sido en la fabricación de más de un año y me ha enseñado mucho sobre el diseño de teoría y circuito de piloto automático. Que un día, ¡ tómate las habilidades utilizadas para realizar este piloto automático y aplicarlos para hacer un piloto automático para catamarán de 38 piesde mi padre!
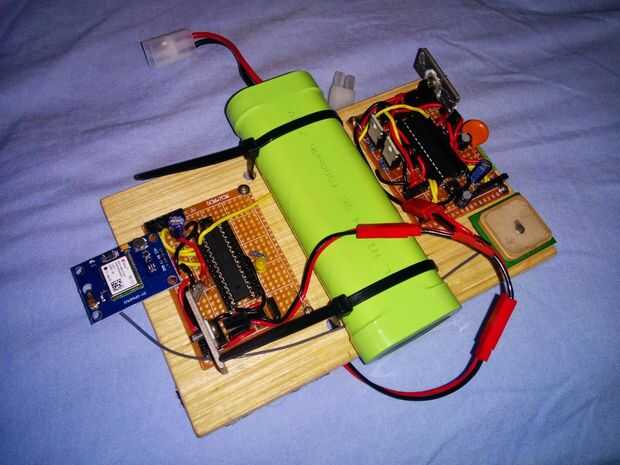
Para llegar a la versión final de este piloto, pasé por tres prototipos principales. Cada prototipo consiguió cada vez más complejo en cuanto a circuitos y código. Después de esos tres prototipos, construí el circuito final, que fue capaz de dirigir un RC barco alrededor de una charca varias veces. Fotos y esquemas muy detallados están disponibles si usted quiere construir su propio.
La versión final está libre de errores, pero todavía tiene margen de mejora. En cuanto a código, todavía necesito el barco para seguir un camino y no simplemente ir a un waypoint (esto contrarresta la deriva lateral). En cuanto a la electrónica, espero añadir un acelerómetro para añadir tilt-compensación a mi brújula.



")






")


