Paso 10: Programación las AtMegas
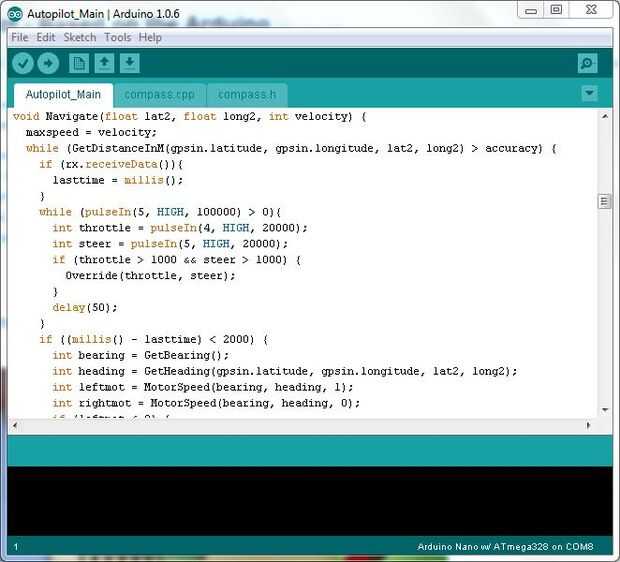
Para programar las AtMegas utilicé un chip FT232, y todo lo que tenía que hacer era conectar en cada circuito y subir el bosquejo apropiado usando la Arduino software (ver imagen de arriba) como lo haría con un Arduino Uno. La única diferencia es que debes seleccionar "Arduino Nano w / ATmega328" en lugar de "Arduino Uno" en herramientas > Junta. El código era muy similar al código utilizado en el tercer prototipo.
El primer boceto analiza datos GPS y había enviado al segundo GPS a través de una conexión en serie. El boceto flash LED en el pin 13 cuando se enviaron los datos, y el LED se iluminará cuando no hay ninguna cerradura GPS.
El segundo bosquejo tiene más responsabilidad. Toma la ubicación de GPS actual, calcula la distancia desde ese lugar hasta el siguiente waypoint, compara la partida hacia el siguiente waypoint con la brújula y controla los motores para ir allí. También es la función de anulación, que se detiene el piloto automático mientras que hay una señal desde el receptor RC. Entonces, esa señal se utiliza para calcular la velocidad de cada motor. Los waypoints que el piloto automático se programan directamente en este bosquejo.
La segunda AtMega también necesita calibrar la brújula antes de usarlo. Esto es donde cambia a biblioteca brújula de helscream que hace la calibración para mí. Cuando termine la calibración, se enciende un LED verde!
El dibujo que subí a cada chip es esencialmente una combinación de todos mis bocetos anteriores.
Usted puede descargar todo el código fuente en el último paso de este Instructable.



")






")


