Paso 2: Prototipo #1

El primer prototipo del piloto automático era muy básico. El objetivo era construir un dispositivo que podría:
- Lea la ubicación de un GPS
- Leer el cojinete de un compás
- Un servo del timón de dirección
- Fórmulas de prueba que son necesarios para hacer un verdadero piloto automático
- Use el timón para evitar que un rodamiento
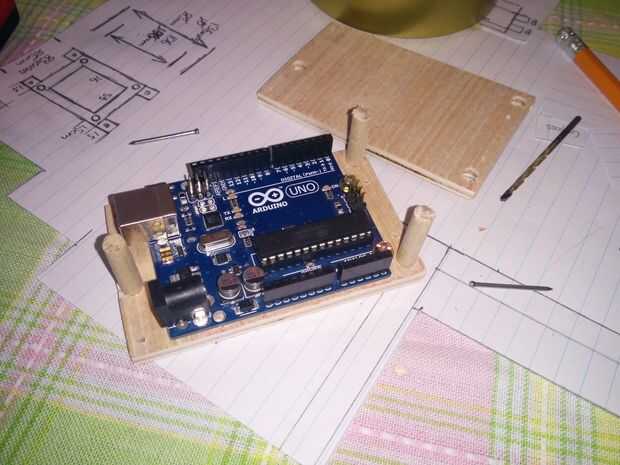
Para este prototipo temprano decidí utilizar un Arduino Uno de los cerebros; Pasar a un Barebone diseño de Arduino (AtMega328) en la versión final.
Lectura de un GPS
Para el primer prototipo, quería el GPS posible más barato pude tener en mis manos, así que me fui con los $8 UBlox PCI-5s. Para conectar el GPS al Arduino, todo lo que tenía que hacer era soldar 4 cables a la parte posterior de la tarjeta, conectar al Arduino, entonces coloque una antena. Usé la TinyGPS ++ biblioteca para analizar datos entrantes en serie, que me permitieron obtener la ubicación actual, velocidad, dirección y más! Aquí está mi otro Instructable sobre cómo implementar este chip. He utilizado este GPS hasta el tercer prototipo, donde sustituye por otro.
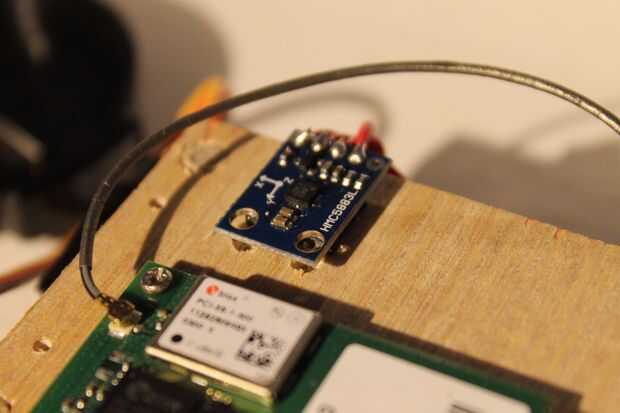
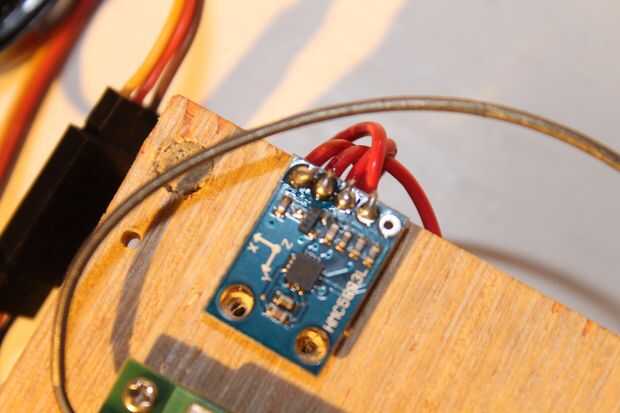
Lectura de una brújula
La brújula que utiliza es el HMC5883L, que conecta con el Arduino a través de I2C. Bildr tiene un muy buen tutorial sobre cómo conectar este compás con el Arduino. Para leer el cojinete usé esta biblioteca Arduino.
Un Servo de dirección
Manejo un servo con un Arduino es increíblemente fácil, pero no cuando la librería SoftwareSerial (necesaria para TinyGPS ++) interfiere con uno de los temporizadores de Arduino! Cuando está ejecutando SoftwareSerial, interferirá con cualquier servos utilizando la librería servo estándar. Una solución sencilla es usar la librería PWM Servo en su lugar.
Piloto automático Implimenting fórmulas
En este prototipo, he implementado varias funciones que se convertiría en críticas más adelante. Estas funciones utilizan el haversin fórmula para calcular cosas como la: distancia entre dos puntos de referencia, dirección de un waypoint al siguiente y real de un cojinete magnético. Aquí es un registro de compilación post que hice en estas fórmulas.
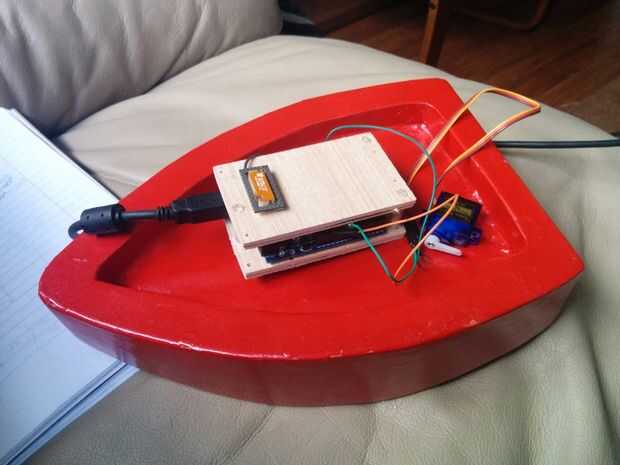
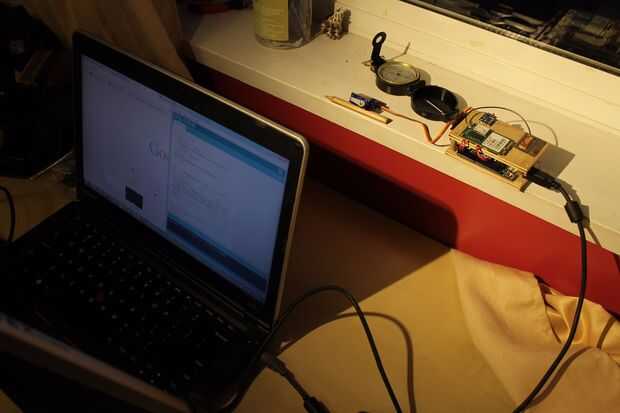
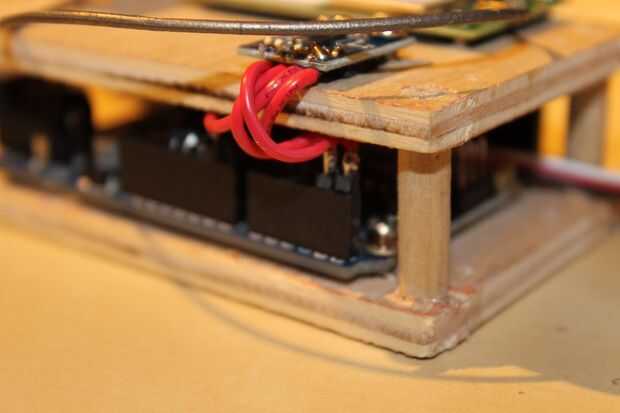
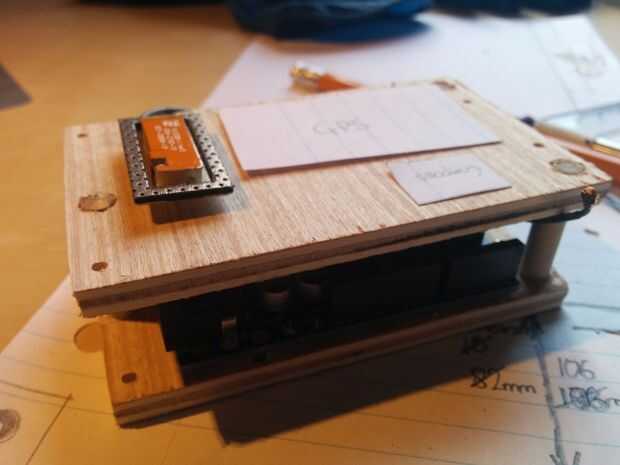
Juntándolo todo
Decidí hacer una caja de madera para unir todo (ver imágenes arriba). Así que ahora que sabía lo que era el cojinete del piloto automático, he podido compararlo con un rumbo preestablecido y gire el timón para mantenga cierta partida. Esto sería necesario más tarde para viajar a una coordenada GPS.



")






")


