Paso 3: Prototipo #2






Estaba satisfecho con el éxito del primer prototipo, así que decidí hacer un segundo uno con la intención de poner en un barco. La mayoría de los cambios a este piloto fueron software basado. Los objetivos para este prototipo fueron:
- Viajar a un conjunto de coordenadas GPS
- Ejecutar el piloto automático en una batería
- Prueba y registro de datos del piloto automático
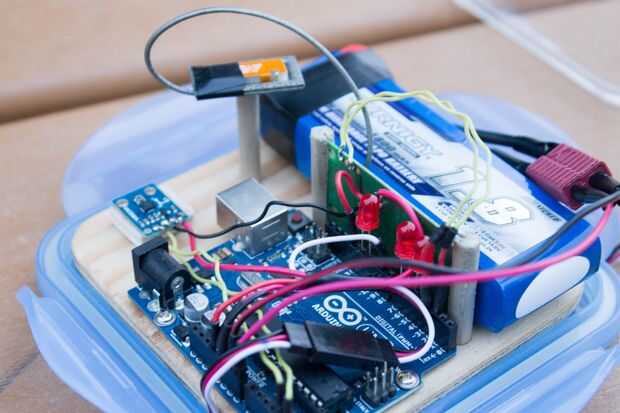
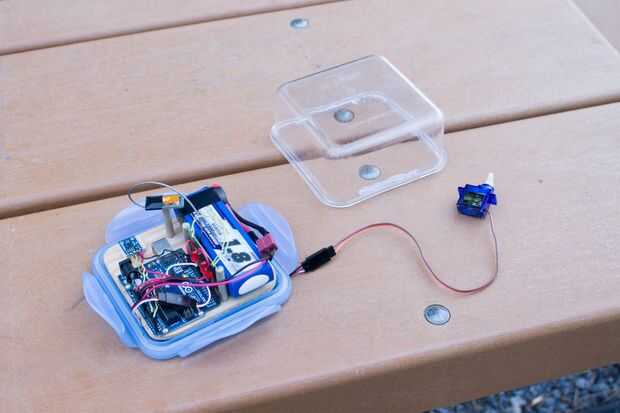
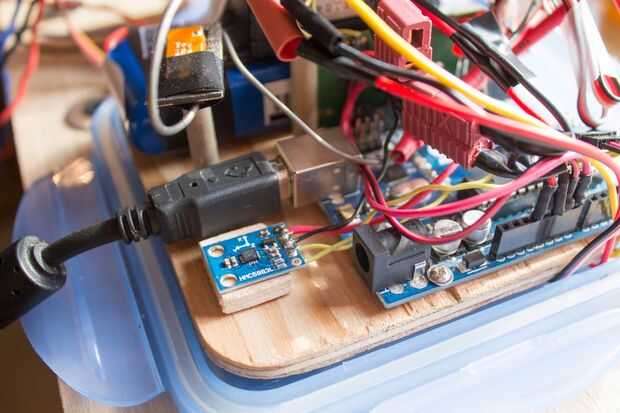
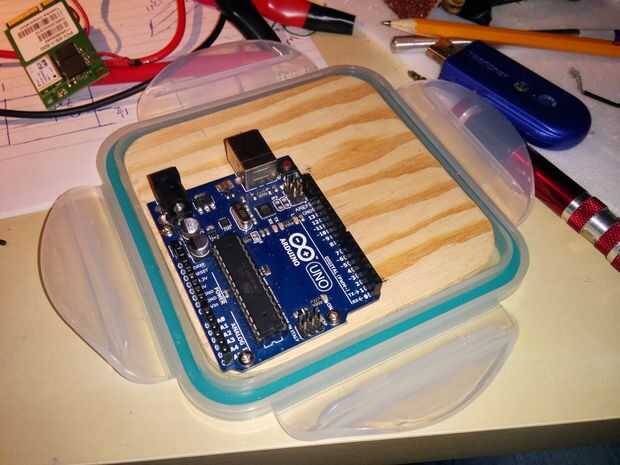
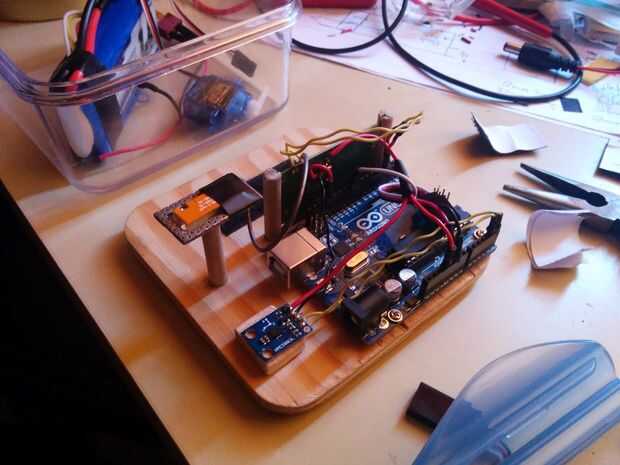
Hice unos cambios a la estructura física del piloto automático. He añadido una ProtoSheild, que conecta con el Arduino y un protoboard pequeño en él. Moví la brújula allí. También une todos los componentes de piloto automático para una nueva base de madera contrachapada y poner esa madera contrachapada base dentro de un contenedor de sandwich.
También probé agregando un receptor RC a este piloto, pero no tuvo éxito debido a la limitación de espacio dentro de ese contenedor.
Viajar a GPS coordina
Programado el Arduino con un dibujo que gira el timón para viajar hacia el siguiente waypoint. El bosquejo utiliza el GPS para calcular el rodamiento a cada waypoint, luego frente a la brújula, y la diferencia entre los dos fue el error. Si el error fue a la derecha, 90 grados, el timón convertiría a 60 grados. Si el error fue a la izquierda, 270 grados, el timón convertiría a 120 grados. Si el error fue entre 330 y 30 grados (recto), entonces el timón se convertiría exponencialmente para seguir recto.
Todo esto iba a suceder en un circuito similar a este (este código es exagerado):
Aquí hay una explicación "inglés" del código anterior: Si la distancia entre usted y lo waypoint es más de cinco metros, luego calcular el cojinete del compás, el cojinete hacia el waypoint, obtener el soporte real de la brújula, luego enviar los dos rodamientos a la función RudderTurn, que calcula el error y da vuelta el timón en consecuencia.
Adición de una batería
Adición de una batería para alimentar el Arduino era simple. Hay un pin de Vin en el Arduino Uno. Acepta hasta 20 voltios DC. Tuve un 12.6, 3 celulares, batería de litio poner alrededor, así que simplemente hice un conector que iban desde la batería hasta el pin Vin.



")






")


