Paso 4: Prueba prototipo #2



Para ayudar con la prueba del piloto automático, he añadido dos LEDs. Un LED se enciende cuando hay un bloqueo GPS, el otro se encienda cuando he llegado a un punto de referencia.
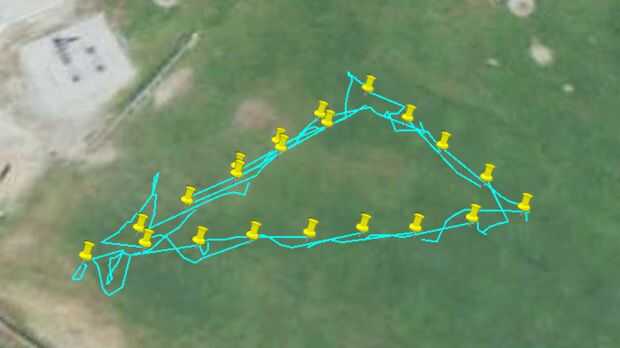
Probando el prototipo
Usé un campo local para la prueba de mi piloto automático. Traigo mi laptop, conectar el piloto automático, funcionaría al serial monitor (parte del software de Arduino) y que grabar las coordenadas GPS, todos caminando a puntos de interés preprogramados. Utilicé el timón que me guíe a cada waypoint, y respondí al timón, girando como un barco.
Las imágenes que ves arriba son sólo algunos de los caminos que grabé. Cuando llego a cinco metros de un waypoint, el piloto automático del interruptor y comience a navegar a la siguiente. Hice un montón de cambios de menor importancia al código durante las pruebas.
Para convertir el texto serial en un track de Google Earth, importados el texto en Excel usando la importación de texto, guardado el archivo, luego seguir las instrucciones en Earthpoint para convertir el archivo a formato KML.



")






")


