Hola amigos.
En este instructable, he mostrado cómo barrer un servo motor con Arduino Nano.
Generalmente el motor servo es utilizado donde es baja velocidad pero con un alto esfuerzo de torsión es necesaria. Este trabajo puede hacerse también por un motorreductor.
Pero los servomotores son diferentes de los motorreductores, servomotores pueden leer posición y pueden girar a dado grados.
Herramientas que necesitaremos.
- Arduino Nano
- Un motor cinemático.
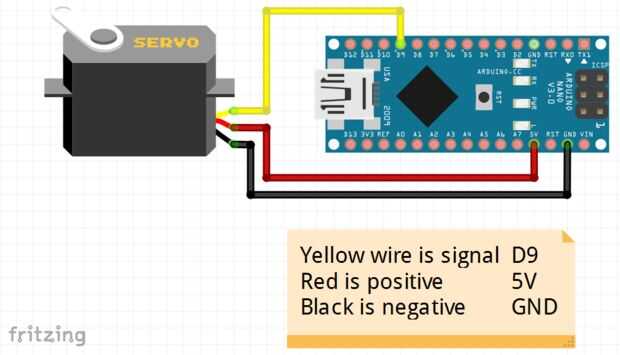
En primer lugar Fije el motor servo a Nano como en la imagen de arriba.
- El cable amarillo es el cable de señal que se unirá al pin digital 9 de Nano.
- El cable rojo es el cable positivo que va conectado a 5V.
- El cable negro es negativo y se conectarán a tierra.
ahora todo es hecho el trabajo de hardware, hacia parte de software.




")







")
