Paso 2: Conecte los cables de


Conecte la alimentación y la tierra de los servos y el micro controlador a la batería. Un conector JST es útil si necesita cargar la batería.
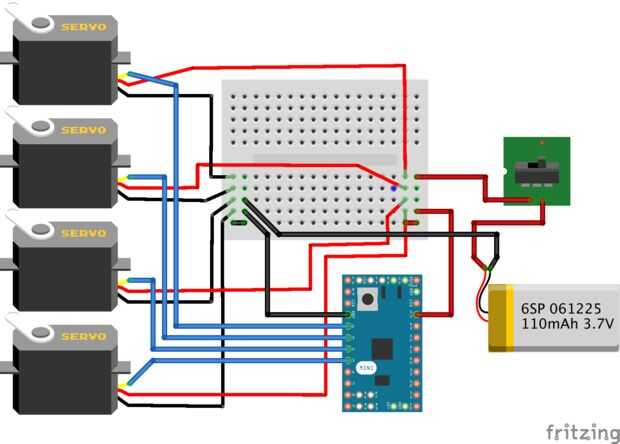
Conectar el servo pulso pin al pin digital 2, 3, 4, 5 en Bluno escarabajo. Si utilizas un protoboard, conecte los servos como la figura que se muestra arriba.
No importa si usted no puede recordar el orden de los pines (yo no), podemos cambiar más adelante en el código.
")


 + App Android")







")

