Paso 1: Ensayos y errores en el diseño del modelo
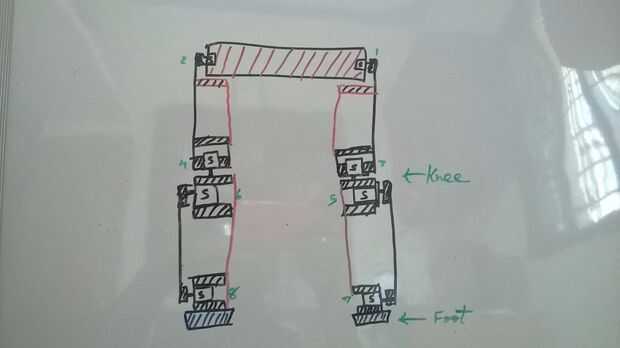


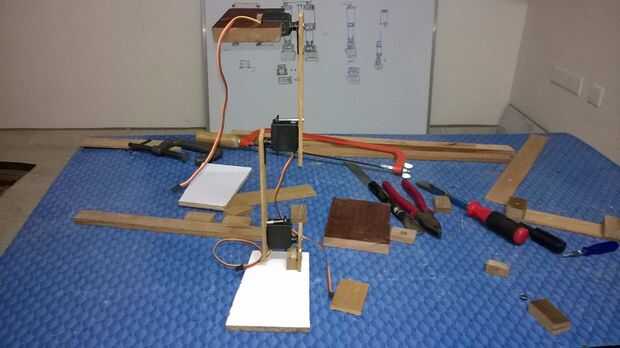
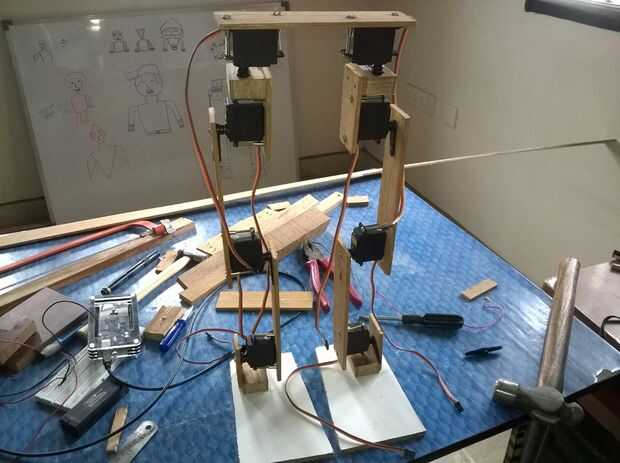





Al principio no tengo ni idea sobre el poder de Servo motores y electrónica-material eléctrico que se ocupa de las baterías y los circuitos. Primero planeé para un robot de tamaño de vida de aproximadamente 5 a 6 pies. Después de probar casi 6 o 7 veces me di cuenta el par de un servo y reduce hasta 2 a 3 pies de altura total del robot.
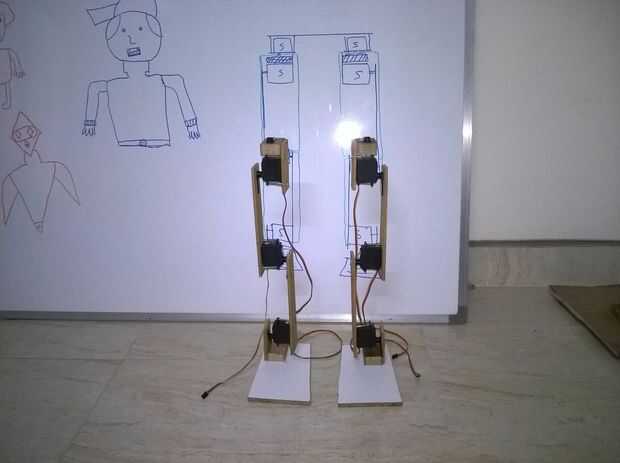
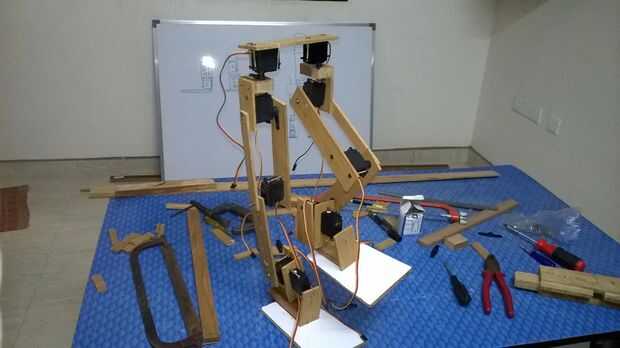
Entonces traté de cadera hasta que el robot para verificar el algoritmo de a pie.



")








