Paso 1: El robot IR radar módulo



El servo gira el sensor IR izquierdo, adelante y derecha y lee la distancia en cada dirección. En este proyecto, el robot girará en la dirección donde hay más espacio.
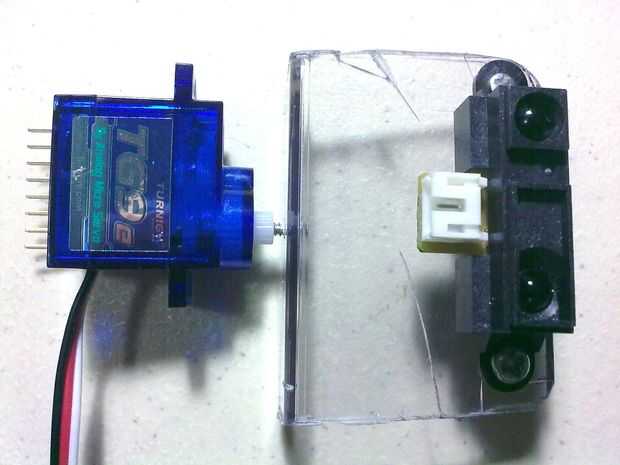
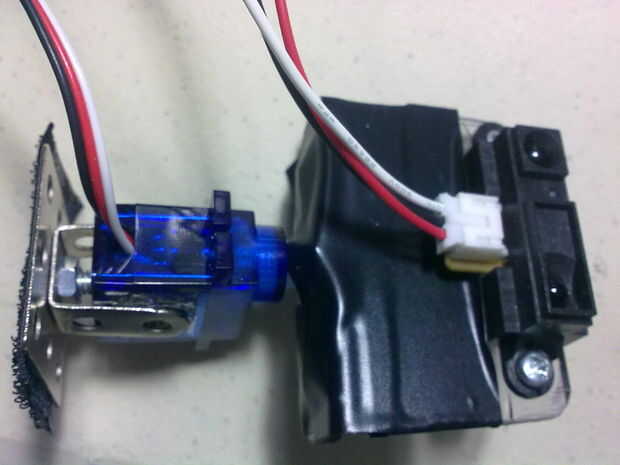
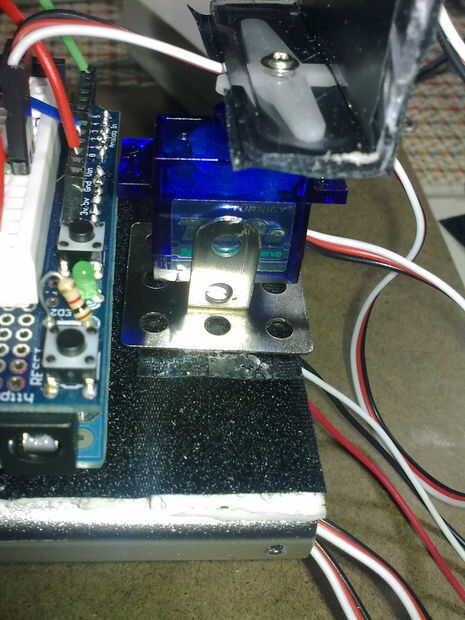
Usé partes del juego de construcción para crear un montaje para el sensor y el servo.
En el vídeo a continuación, probar el escáner de radar de IR conectado al Arduino y girar por un servo micro TG9e. Envía detrás las distancias para cada dirección.
Con un trozo de Velcro en la parte inferior de la montura, con cola, puedo colocar el mecanismo de radar toda la plataforma de robot y cambiar su posición con poca molestia.








 Básicos Arduino Robot buscador de luz!")




