Paso 4: Integrar el cerebro del robot con la plataforma

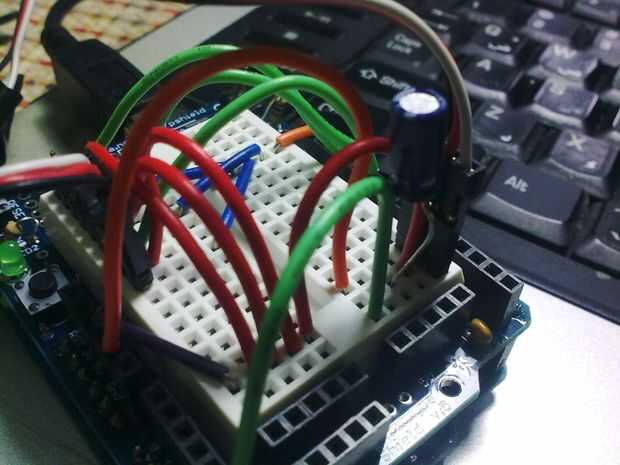
Luego vino la parte difícil: codificación el Arduino para controlar los 3 servos y el sensor de infrarrojos.
Nota: empecé los ensayos con un 9V (6 X AA) fuente de energía pero decidió separar energía a Arduino/IR a 9V y alimentar los 3 servos de un 6V (4 X AA) o 4.8V si usa 4 AA NiMh. El ruido generado por los servos era lanzar de las lecturas del sensor IR y basado en las experiencias de los demás, es mejor separar las fuentes de energía.
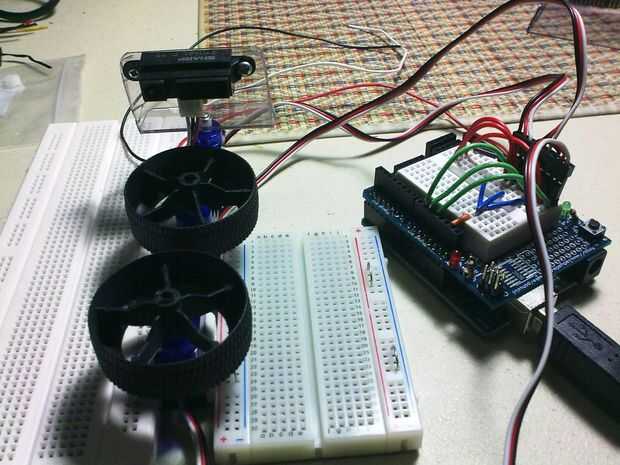
En este video, estoy probando el robot completamente montado en el laboratorio para asegurar que las ruedas están reaccionando correctamente a la información del radar IR. Por supuesto esto sólo prueba la exactitud de las indicaciones de giro de la rueda. Sin tracción de la rueda, no es posible saber cuánto tiempo las ruedas deben girar para hacer un buen giro. Estos datos se pueden medir sólo al probar el robot en la superficie del blanco. En mi caso, suelo de mármol.








 Básicos Arduino Robot buscador de luz!")




