Paso 2: Montaje de componentes del robot

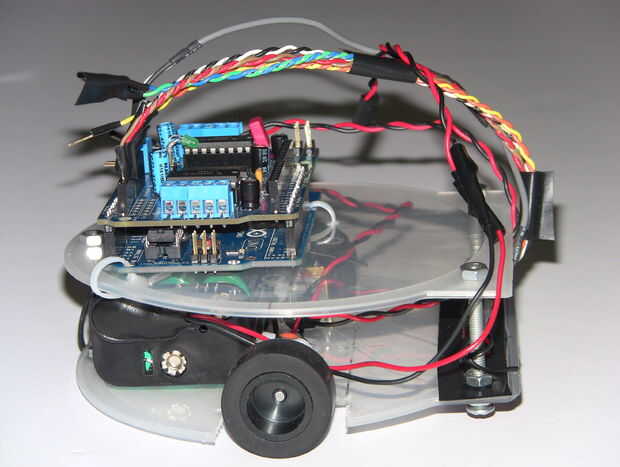
Si tienes todo en orden, este proyecto debe tomar máximo 10 horas a un ritmo muy pausado. La primera vez que construí, me encontré con todo tipo de temas porque no hacer un seguimiento de mis cables y porque no tenía todos los conectores necesarios a la mano así que hice un montón de soldadura para conectar los sensores con Arduino. Pero una vez que superé todos los obstáculos de cableado, reconstruir el robot trataba de 3-4 horas.
La codificación y depuración tuvo otro pocas horas la primera vez. La segunda vez que reconstruir este robot, es simplemente una cuestión de carga y funcionamiento.
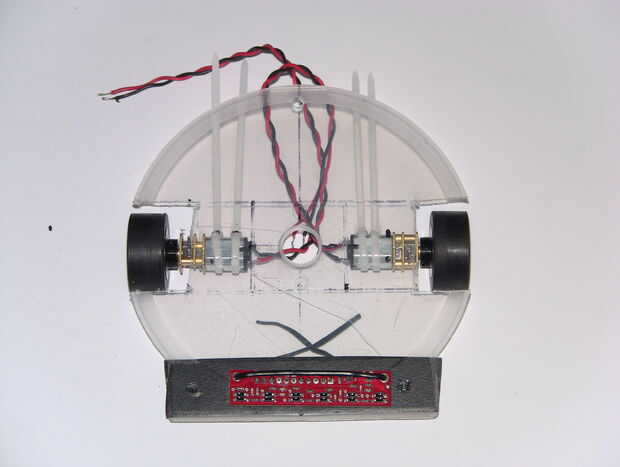
Ser consciente de tu robot a derecha e izquierda motores. Los motores y los cables así como los terminales a que están conectados la etiqueta y que debe repuesto tiempo depuración innecesaria. Muestra un testigo de invertir motores o signos variable invertidas es si el robot gira hacia la dirección equivocada siempre.
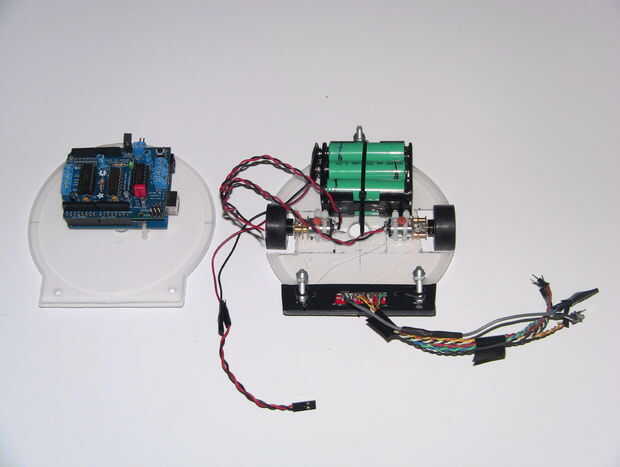
Funciona el robot a través de los pines de alimentación externa motor shield Adafruit. No necesito alimentar los motores por separado de la Arduino. El 7.2V ladrillo de la energía hizo un trabajo fino de alimentar el robot entero. No tuve reinicios o funcionamiento errático.
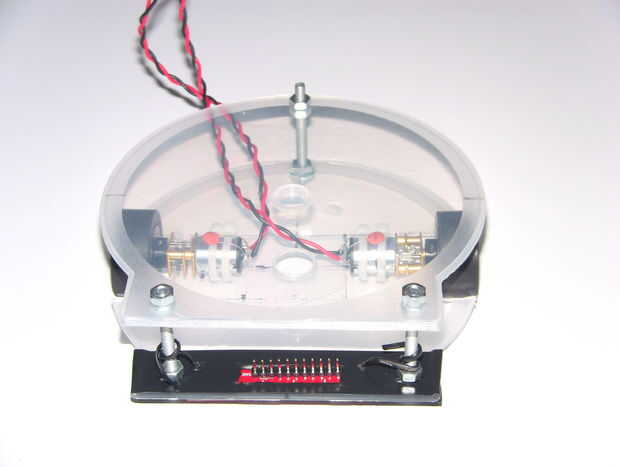
En cuanto a la parte delantera y traseras ruedas, la suave punta semiesférica de los tornillos fue lo suficientemente buena para permitir el movimiento liso. Ruedas especiales no fueron utilizadas. Estoy seguro de que los tornillos crearon fricción extra pero no disminuir el rendimiento por mucho. Pude han utilizado un LED para ruedas igual de bien.










")


