Paso 1: Edificio jolliBot
Es muy simple construir un seguidor de línea básica como sólo algunos componentes son necesarios:
- un chasis del robot
- algunos sensores de línea (líneas negras o blancas) de seguimiento
- dos motores (servos o motores de engranaje)
- un circuito microcontrolador y electrónico a los motores y a implementar la lógica de control
- Baterías, puentes de conexión, tornillos y otros herrajes
Para un seguidor de línea básica, 1 sensor sólo puede ser necesaria para alcanzar la línea que sigue la función en de poca velocidad y en pistas continuo simple. Algunos seguidores de línea avanzada emplean sensores mucho más que especialmente están dispuestos a seguir pistas complejas a gran velocidad.
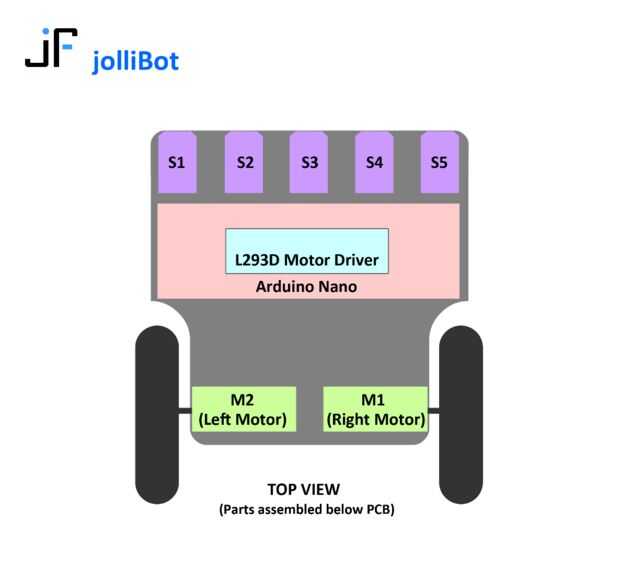
Para jolliBot, vamos a usar 5 sensores reflexivos TCRT5000 IR. Es común utilizar la cinta de aislamiento eléctrico ancho negro o blanco de 18mm para construir pistas de seguidor de línea. Para nuestros seguidores de línea, la serie de 5 sensores es organizar en una formación de la típica línea recta en la parte delantera y son equidistantes 10,16 mm.. Esto permite un máximo de 2 sensores para detectar la línea ancha de 18mm si va por el seguidor de línea recta a lo largo de la línea. 5 sensores deben ser suficientes para poder experimentar con una gama de estrategias para la siguiente línea.
Para el microcontrolador, estaremos usando actualmente uno del más popular entre los aficionados que es el Arduino Nano es relativamente pequeño y fácil de volver a programar a través de USB.
Para los motores, vamos a usar dos micro planetaria orientada-motores de corriente continua funcionando a 5V DC que están disponibles desde Tindie equipado con ruedas de 32 mm de diámetro.
El mecanismo de dirección para jolliBot se realiza en una unidad diferenciada que dirigir el robot por diferencia en la velocidad de rotación de la rueda izquierda y rueda derecha.
Para conducir los motores, vamos a usar el controlador de motor L293D puente H IC ya que Arduino no puede alimentar los motores directamente con la alta corriente necesaria.
Podemos conectar el circuito de la electrónica para nuestro jolliBot sigue líneas bordo perf-no más de 6 cm x 6 cm. No va a utilizar un chasis separado de robot y en su lugar se utilizará el mismo tablero perf como el chasis del robot. Ya que puede ser bastante tedioso construir el circuito electrónico en tablero de perf, hemos diseñado un PCB para aquellos que no quieren ensuciar con mucho cableado.
Suministro de energía, no utilice el habitual 3 x batería AAA que es fácilmente disponible que puede dar salida a unos 4.5V. La tensión de salida es insuficiente para alimentar confiablemente el Arduino Nano. Aquí, usaremos un 3 x AAA alimentación con batería de refuerzo incorporado de DC a DC a 5V directamente para el Arduino Nano, así como para conducir los motores. Esto mantiene un voltaje de entrada más constante para el circuito electrónico, así como por el micro orientado-motores DC. La unidad de alimentación de 5V DC está disponible en Tindie. Usted puede también fuente para cualquier otro conveniente 5V power packs para el proyecto.
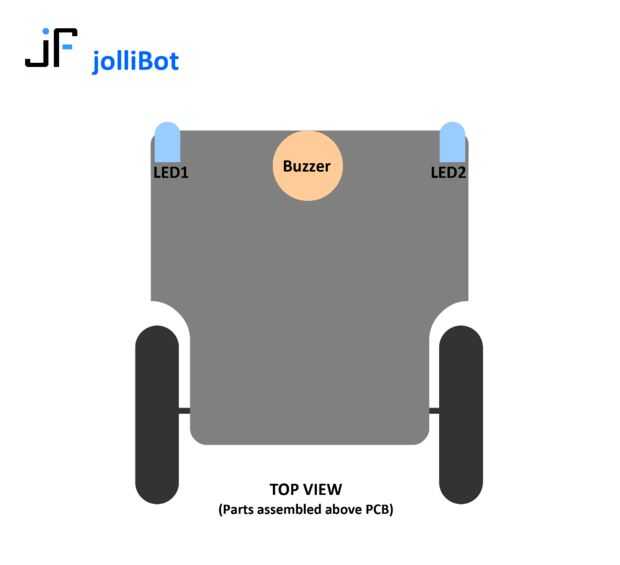
Salida de audio, vamos a usar un timbre de 5V. En nuestro programa de Arduino, hemos codificado para que jolliBot se emiten algunos sonido de advertencia para alertar que va a realizar la normalización del sensor. Usuario debe entonces colocar alrededor del centro de la línea y rápidamente asegurar que nada está obstruyendo su camino para el proceso de ser ejecutado con éxito.
Deberá contar con 2 LEDs que actúan como los faros delanteros izquierdos y derecho. En nuestro programa de Arduino, hemos codificado para simplemente conéctelos siguiendo la línea. Usted puede programar para activar o desactivar en base a algunas operaciones definidas.
La ubicación de la disposición de los sensores y los motores montados sobre el perf- o en nuestro PCB personalizado puede encontrarse en las imágenes adjuntas.
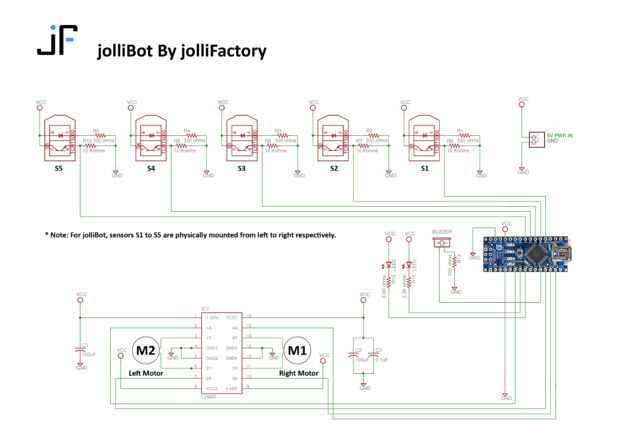
Nosotros no mostrará usted el detalle sobre cómo cablear el circuito en el tablero de perf. Usted tendrá que encontrar la manera mejor para construir el circuito en el tablero de perf mismo basado en el diagrama esquemático para jolliBot.
En la siguiente sección, debemos mostrar cómo jolliBot es montado utilizando nuestro PCB fabricado. Que esto debería ser útil si usted está siguiendo este proyecto cableado utilizando el tablero de perf.
Como mencionamos anteriormente, necesita tener conocimiento de electrónica básica para construir el circuito en el tablero de rendimiento basado en el diagrama esquemático aquí.





 + App Android")







