Paso 3: Montaje de jolliBot



Usted puede ver el siguiente video de YouTube para ver el montaje de jolliBot kit de bricolaje para entender cómo es jolliBot.
Los siguientes son los pasos a seguir para el montaje de jolliBot:
PRECAUCIÓN: Identificar la parte superior y parte inferior de la PCB de las etiquetas 'Superior' e 'Inferior' serigrafiado en la placa. Asegúrese de que está en el lado correcto del PCB antes de proceder a soldar los componentes.
Paso 1: Doblar las resistencias de cinco 330 ohmios y les de la soldadura vertical para R1, R2, R3, R4 y R5 en la parte inferior de la PCB.
Paso 2: Doble las dos resistencias de 3.3K ohms y les de la soldadura vertical R11 y R12 en la parte inferior de la PCB.
Paso 3: Doblar las cinco resistencias de ohms de 12K y les de la soldadura vertical para R6, R7, R8, R9 y R10 en la parte inferior de la PCB.
Paso 4: Doblar la resistencia de 100 ohmios y soldadura vertical a R13 en la parte inferior de la PCB.
Paso 5: Soldadura el 0.1uF condensador a C3 en la parte inferior de la PCB.
Paso 6: El zócalo de 16 pines IC a IC1 en la parte inferior de la PCB de la soldadura. Asegurar la orientación correcta.
Paso 7: Inserte el L293D IC IC1 zócalo. Asegurar la orientación correcta.
Paso 8: Soldar los LEDs 5mm LED1 y LED2 con las piernas que se extiende alrededor de 8mm arriba del PCB. Asegurar la polaridad correcta con plomo más larga del LED soldada a '+'. Los LEDs no necesitan ser doblados hacia delante en esta etapa.
Paso 9: La toma de corriente de batería a J4 en la parte superior de la PCB de la soldadura. Asegurar la orientación correcta.
Paso 10: Los dos condensadores de 100uF C1 y C2 en la parte inferior de la PCB de la soldadura. Asegurar polaridad.
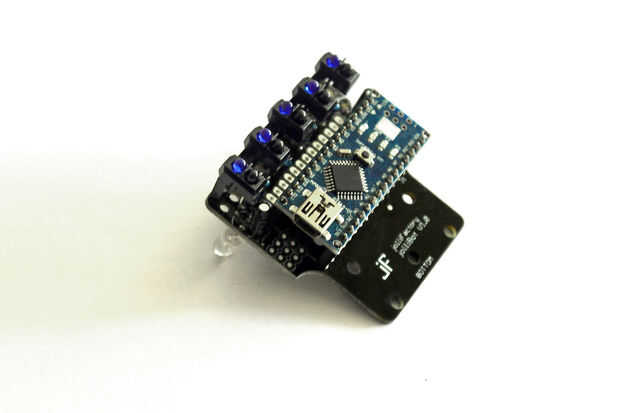
Paso 11: Saque 8 de las clavijas de la cabecera de 18 pines hembra como se muestra en la siguiente figura y luego la soldadura a través de sensores S1 a S5 en la parte inferior de la PCB.
Paso 12: Recortar ambas piernas del IR LED (lentes azules) en los cinco sensores ópticos TCRT5000 a una longitud de unos 6mm de la parte inferior de la carcasa de plástico negro. Inserte las patas cortadas para cada uno de los cinco sensores TCRT5000 en la cabecera de 18 pines hembra y las otras 2 patas sin recortar para S1, S2, S3, S4 y S5 respectivamente en la PCB de la soldadura.
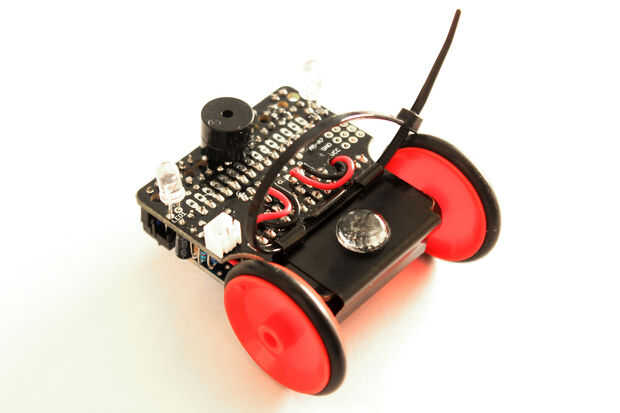
Paso 13: Inserte el zumbador desde la parte superior de la placa y soldar los terminales del timbre desde abajo. Asegurar polaridad (se debe dejar la marca '+' en la parte superior de zumbador). Tenga en cuenta que esta es la tarea más difícil debido a la limitación de espacio para la soldadura de los terminales de zumbador.
Paso 14: Los encabezados femenina dos 15 pins J1 y J2 en la parte inferior de la PCB de la soldadura. Puede insertar en el Arduino Nano en los encabezados de la mujer antes de soldar para sujetar los encabezados en su lugar durante la soldadura.
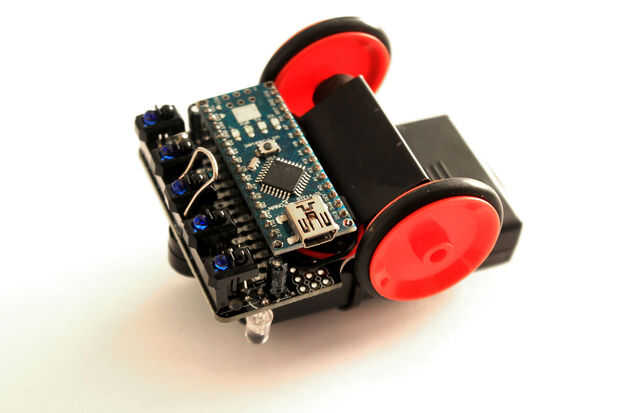
Paso 15: Encamine los alambres de los motores de dos ruedas a través de los 2 agujeros cerca de cada extremo del IC1 y soldar los cables del motor M1 y M2 en la parte superior de la PCB. Asegurar el cable negro y rojo se sueldan a los pins correctos en M1 y M2 como se muestra en la figura.
Paso 16: Utilice el clip binder de metal para sujetar los motores de dos ruedas. Ajuste de los motores para que se fija tanto como sea posible pero debe estar buena separación entre las ruedas y el PCB. Quitar ambos controles de clip.
Paso 17: Pegar el adhesivo parachoques circulares claro en la carpeta del metal como se muestra en la figura siguiente.
Paso 18: Inserte el cilindro formado de alambre en la cabecera de 18 pines hembra como se muestra en la figura siguiente.
Paso 19: Inserte el Arduino Nano en las cabeceras en J1 y J2 en el PCB. Asegurar la orientación correcta.
Paso 20: Lazo el lazo de cable a través de las ranuras en el clip de metal carpeta como se muestra en la figura y hacer un lazo tal que el cable lazo lazo tamaño es apenas suficiente para insertar el paquete de energía a través de.
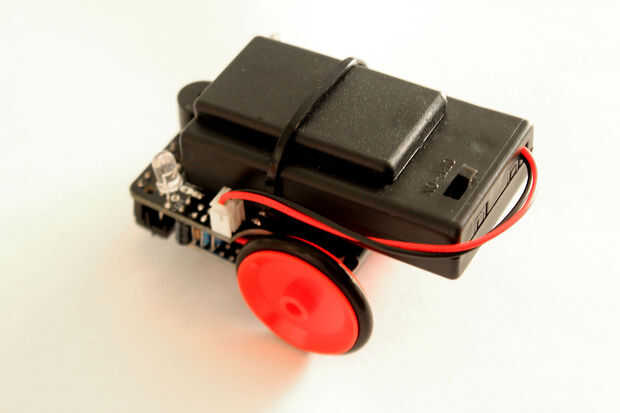
Paso 21: Deslice la batería energía de 5V a través del lazo de amarre de cable y recorte el extremo del lazo de cable sobrante. Enchufe el conector de alimentación en el conector J4.
Paso 22: Doblar los 2 LEDs al frente para completar el seguidor de línea.





 + App Android")







