Paso 4: Programar el Arduino
En el jolliBot en acción YouTube video, que hemos probado el seguidor de línea con control básico así como un más avanzado control PID códigos de programa. Con el control básico, usted puede notar el movimiento nervioso y oscilante del seguidor de línea pero con el más avanzado control de PID, hay una notable mejora en la velocidad y el movimiento de nuestro seguidor de línea.
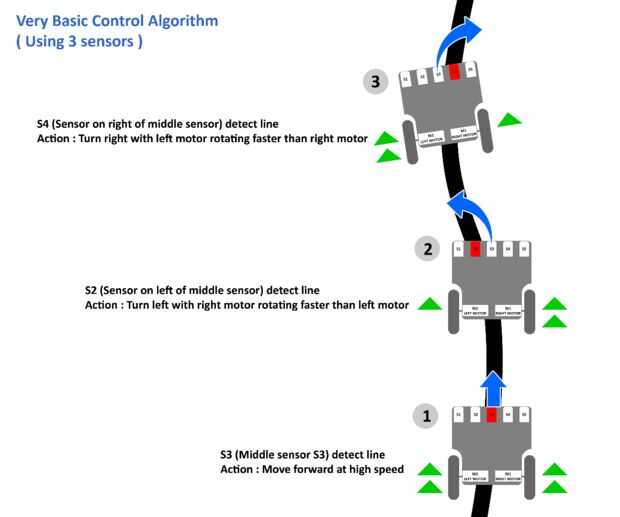
Para nuestro control básico, usamos solamente 3 de los sensores de línea para la detección de línea, izquierda (S2), centro (S3) y derecha (S4). Cuando el centro detecta la línea, el robot está programado para ir directamente. Cuando el sensor del centro ya no detecta la línea pero la izquierda detecta la línea, el robot es programado para girar a la derecha. Cuando el sensor del centro ya no detecta la línea y el sensor derecho detecta la línea, el robot es programado para girar a la izquierda. Normalmente esto hará que el robot a tambalearse hacia adelante y hacia atrás sobre la línea y si va demasiado rápido, puede perderán el control y parar la línea.
Puede descargar nuestra línea básica siguiendo el sketch de Arduino concepto siguiente:
jolliBot_3Sensors_BasicControl.ino
Sabemos que es posible mejorar el movimiento y la velocidad de jolliBot con algoritmo de control más avanzado como en el video. Sin embargo, no proporcionaremos más avanzado aquí el código de Arduino. Esperamos que usted puede investigar y elaborar códigos para jolliBot a mejorar su rendimiento.





 + App Android")







