Paso 7: Tablero de Control del Motor
Circuito de control del motor está construido en el tablero de vero, exactamente a las medidas del tablero de control interno del juguete. Perforé dos agujeros en exactamente los mismos lugares que el tablero de control original para poder volver a utilizar el hardware de montaje.
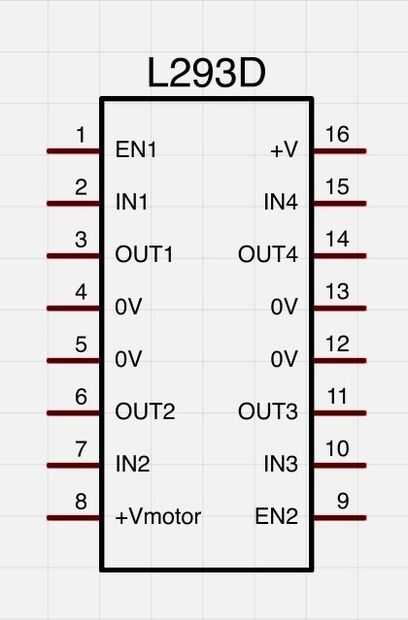
Hay un montón de diagramas para chip L293D puente H en internet. Me refiero a la Publicada en la página web Adafruit.com.
Aquí es cómo se asignan los pernos en mi L293D:
- conectar a + 5V pin de Arduino
- conectar al pin digital #6 de Arduino
- conectar al pin #1 del motor #1
- Conecte a tierra
- Conecte a tierra
- conectar al pin #2 del motor #1
- conectar al pin digital #9 de Arduino
- conectarse "+" de la potencia del motor de alimentación (el pack 6V doble de 2xAAA)
- conectar a + 5V pin de Arduino
- conectar al pin digital 3 # de Arduino
- conectar al pin #2 del motor #2
- Conecte a tierra
- Conecte a tierra
- conectar al pin #1 o #2 del motor
- conectar al pin digital #5 de Arduino
- conectar a + 5V pin de Arduino
Ambos motores en el escarabajo ya tienen "tratamiento de condensador completo", por lo que solo tienes que soldar los cables de los pines del L293D 3, 6. 11 y 14 y resistencias respectivas en los motores.













 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")