Paso 19: Primer intento: haga las conexiones

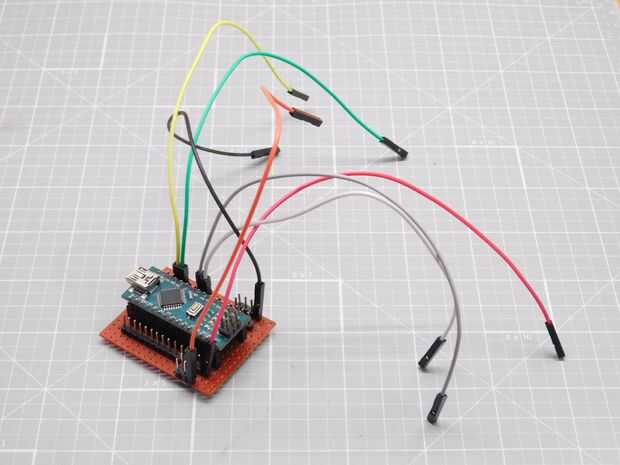
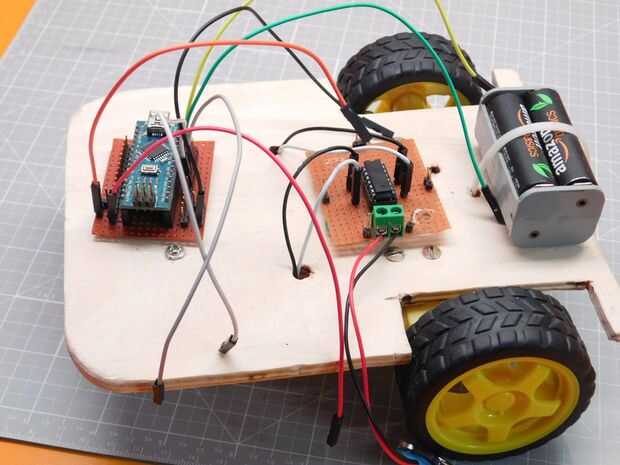
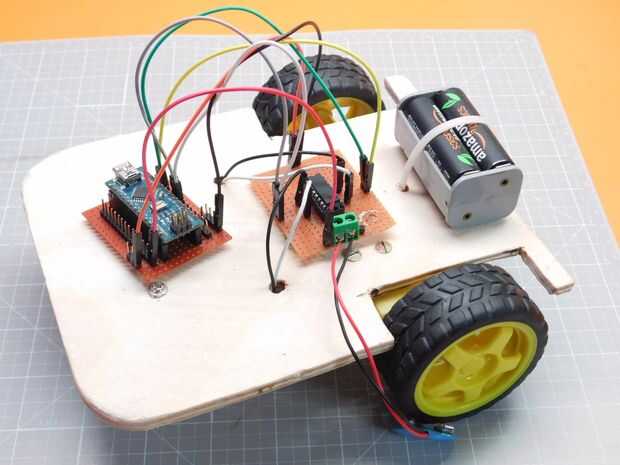
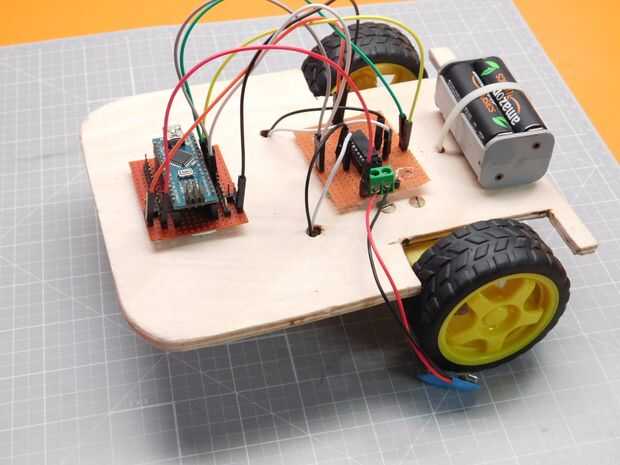
Ahora que finalmente haya terminado con lo que la base y añadiendo las piezas necesarias. Este paso es opcional a y es básicamente comprobar que todo está bien. Yo utilizando un arduino como el cerebro para hacer el robot avanzar primero y luego a la derecha, la izquierda, hacia atrás. Para ello, primero tienes que hacer todas las conexiones de la placa arduino para el conductor del motor. Puede utilizar UNO, Nano o cualquier versión compatible. Utilice los cables de puente para realizar las conexiones como sólo se trata de un proyecto temporal.
- Arduino Vcc --- batería + ve terminal
- Arduino 5v --- Pin 1, 9, 16 de conductor del motor IC
- Arduino Gnd --- Pin 4, 5, 12, 13 del IC y terminales de baterías - ve
- Pin Arduino Digital 5 --- Pin 2 del IC
- Pin Arduino Digital 6 --- Pin 7 del IC
- Pin Arduino Digital 9 --- Pin 10 del IC
- Pin Arduino Digital 10 --- 15 Pin del IC
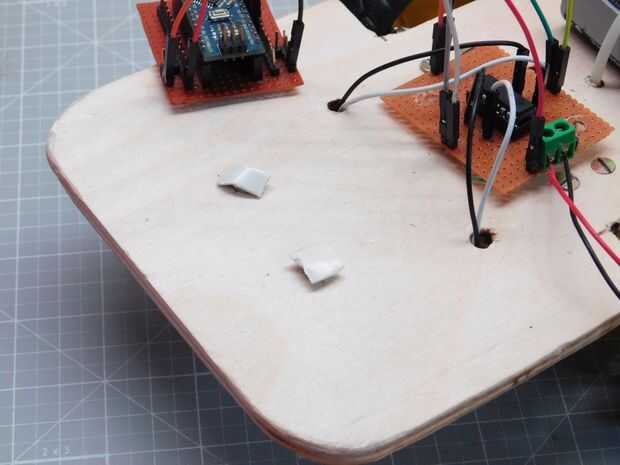
Después de hacer todas las conexiones, Monte su arduino temporalmente a parte vacante anterior de la base con cinta de doble cara. Antes de eso, debe asegurarse de que no hay tornillos ni piezas metálicas expuestas. Si sí, entonces todos ellos con alguna cinta de aislar antes de montar la placa. En caso de que usted está usando arduino Nano, puede que necesite un escudo o algo similar para hacer las conexiones con los cables del puente como en mi caso.
")

")


")



 de rehabilitación")



