Paso 20: Cargar el código y verificación
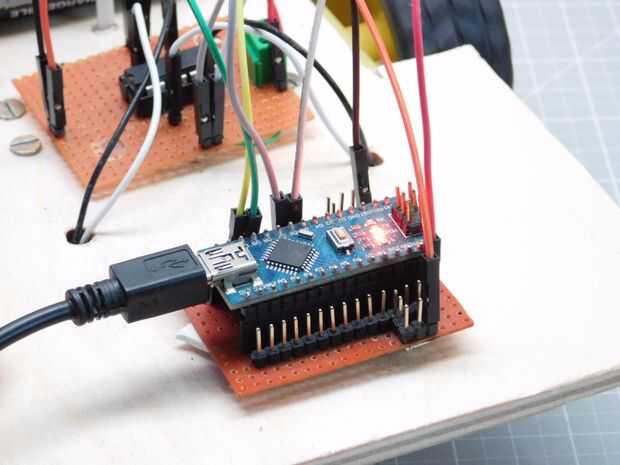
Después de que hayas terminado de hacer todas las conexiones, la próxima cosa que tienes que hacer es subir el código a continuación. Primero seleccione la Junta correcta y puerto serie de su IDE y luego descargar y cargar el código en el archivo de ino a continuación.
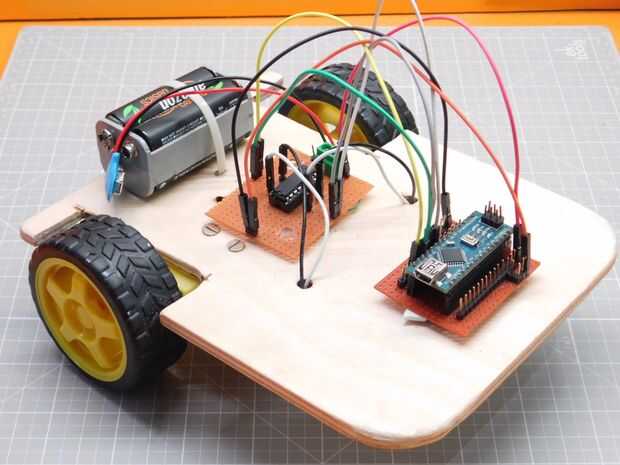
Finalmente, conecte el cierre de la batería a tu pack montado y usted debería ver los LEDs en su arduino iluminan. Ahora abandone inmediatamente el robot en un piso liso y verá el robot rondando según lo siguiente:
- Hacia delante durante 3 segundos a disminuir velocidad
- Derecha durante 2 segundos.
- A la izquierda durante 2 segundos.
- Hacia atrás por 3 segundos, a disminuir la velocidad
__________________________________
Solución de problemas:
¿Q1: Robot mover izquierda o derecha cuando debe avanzar?
A1: Tratar de cambiar las conexiones de los motores de izquierda o derecha para controlador de motor. Después de un poco de experimentación, se debe finalmente hacerlo bien.
¿Q2: Robot mueva hacia atrás cuando debe avanzar?
A2: Intercambiar las conexiones de los motores de ambos.
¿P3: Robot no se mueve nada pero LED arduino es brillantes?
A3: Revise todas las conexiones de nuevo y compruebe si el circuito del conductor se suelda correctamente.
¿P4: Nada de trabajo, incluso el arduino?
A4: Compruebe si las pilas están conectadas correctamente o si ellos están totalmente cargadas.
")

")


")



 de rehabilitación")



