Paso 4: Conectar los pines de Control del Motor
El conductor del motor cambia la polaridad de los pares de 01 y 02 para A y B para controlar la dirección que cada motor hace girar el motor. Pulsos PWM a través del mismo controlan de la velocidad de cada uno de los motores.
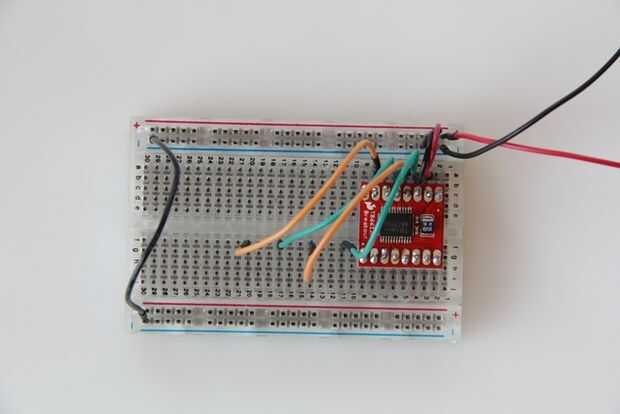
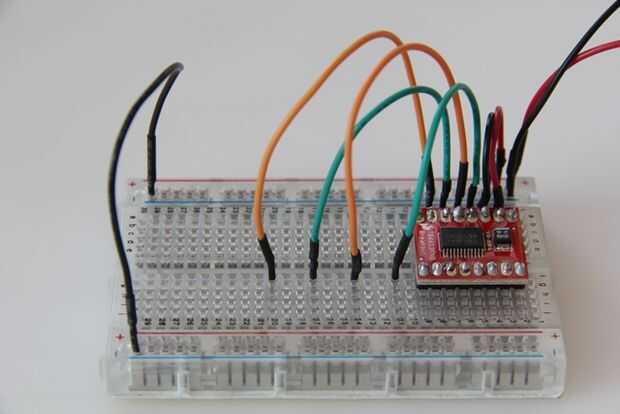
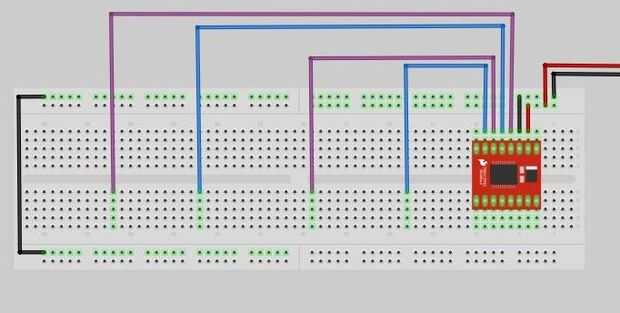
Conecte el A01/A02 & B01/B02 de la impulsión del motor a puntos de la protoboard. Espacio el jumper cables 2 puntos separados para permitir conectar los diodos en el siguiente paso, así como para mantenerla compacta.









")



