Paso 6: Conecte los pines de Control
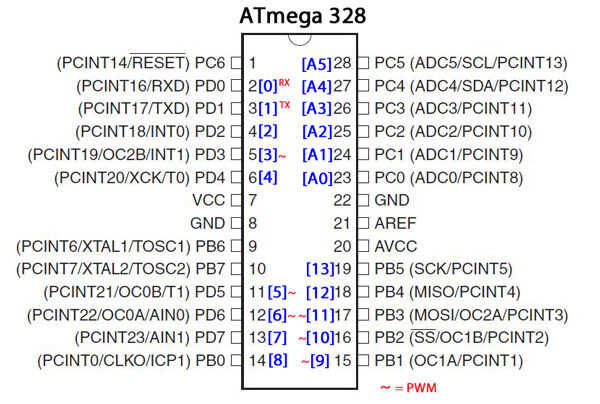
Como nos estamos Conectando Arduino a un bordo que construimos (y no un Uno, etc.), es necesario recordar que los números de pin en el ATmega a continuación son la lógica, no física que. Para recordar, he incluido los números lógica en un diagrama de arriba, los paréntesis cuadrados azules (eg. lógica pin 4 = física pin 6).
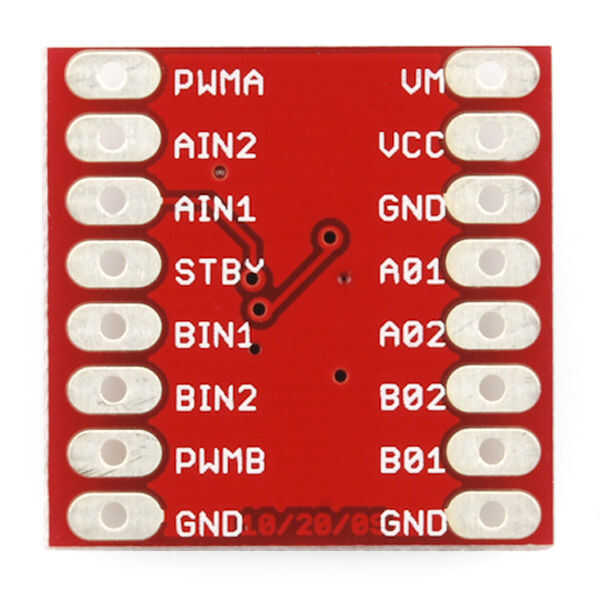
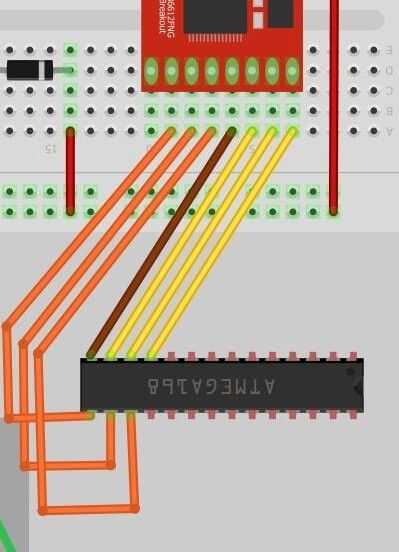
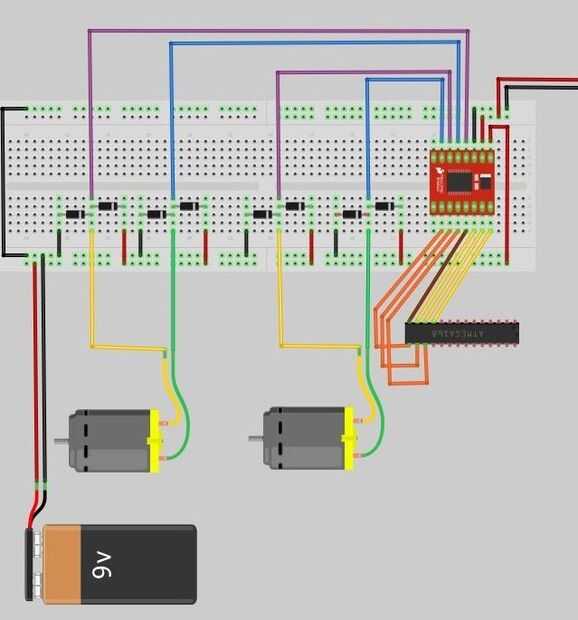
Conexión como sigue:
-ATmega Pin 5--> PWMA (velocidad del motor A)
-ATmega Pin 6--> AIN1 (Dirección #1 para un Motor)
-ATmega Pin 7--> AIN2 (dirección 2 # para un Motor)
-Pin ATmega 8--> STBY (Desconectar / conectar motores)
-ATmega Pin 9--> PWMB (velocidad para motor B)
-ATmega Pin 10--> BIN2 (dirección 2 # para un Motor)
-ATmega Pin 11--> BIN1 (Dirección #1 para el Motor B)









")



