Paso 7: Añadir un sentido del tacto
Soldadura de conectores en los interruptores
La mejor manera de conectar los switches para el proyecto es para la soldadura de conectores de cables en los contactos del interruptor. Verás que estoy usando interruptores SPDT (un polo, doble tiro), pero para este proyecto se pueden utilizar así los interruptores SPST (polo simple, tiro simple).
Corte orificios en el cuerpo
Cortar pequeños agujeros rectangulares para que los bigotes del proyecto más allá de la parte del robot, pero los interruptores están escondidos dentro. Perno de les en el cuerpo para mantenerlos en su lugar.
Conectar los interruptores
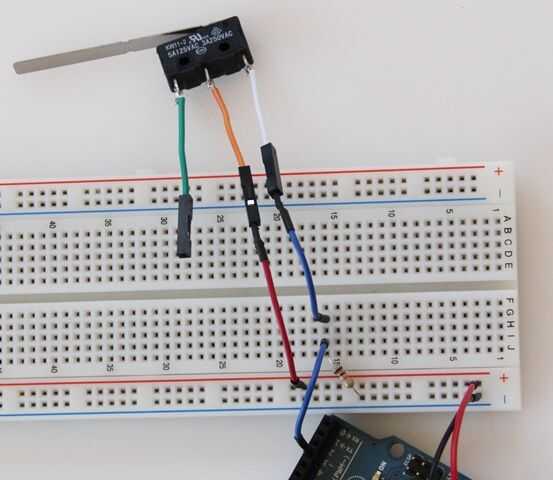
Como con todos los interruptores y botones, estos no proporcionan una señal confiable cuando no son cerradas (es decir, haciendo contacto) – flotan, al azar, enviando señales de alto o bajo. Por lo tanto necesitamos ya sea tiramos el interruptor hacia arriba o hacia abajo cuando está abierta, en este caso queremos que el interruptor que baja para que tire hacia abajo con una resistencia de pull-down 10 k.
¿Si estás usando un interruptor SPDT, tendrás 3 conectores - que 2 de estos debería utilizar? Una prueba fácil es usar un multímetro (o incluso probarlo en un protoboard como el circuito en la imagen arriba, añadiendo un LED) y asegúrese de que el circuito está completo cuando el interruptor está cerrado (activado).
Para cada switch:
- Conecte un terminal + ve tren
- Conecte el otro terminal a la protoboard. En la misma fila de la protoboard:
- conectar una resistencia de ohmio 10 k a GND (resistor de pull-down)
- Conecte un puente al pin correspondiente en el Arduino
Conecte el interruptor izquierdo al Pin 2 y el derecho al Pin 3.
Como la Junta es complejo ahora (un poco de un ratsnest), he incluido una imagen arriba del cableado en un tablero vacío para mayor claridad.



")









