Paso 3: Construir el circuito
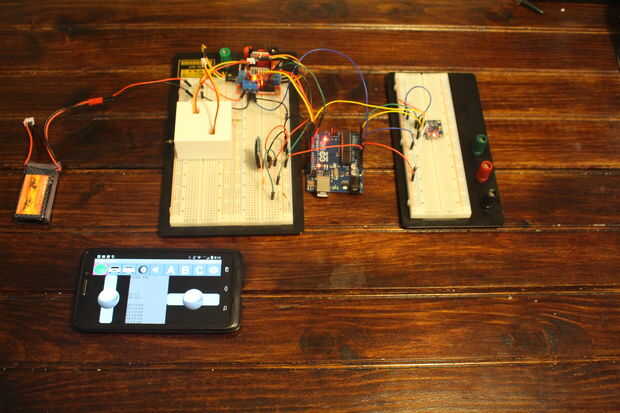
Diseño y pruebas del circuito siempre es un buen paso para hacer. Permite encontrar problemas o realizar cambios. Lo hice para verificar el funcionamiento apropiado de cada componente y también para probar código.
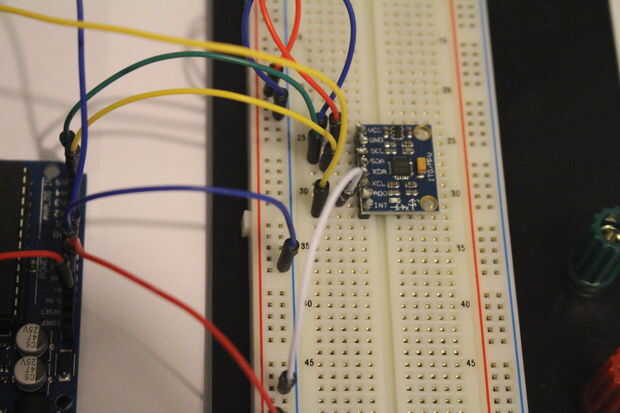
MPU6050 Acelerómetro giroscopio:
Este dispositivo se utilizará para determinar el ángulo de la cabeza BB8. Con el fin de mantener la cabeza en posición vertical.
Módulo BlueTooth HC-06:
Este dispositivo se utilizará para aceptar comandos de dirección desde el teléfono para el Arduino para controlar los motores en la base de BB8. Un divisor de tensión tendrá que ser utilizado para proteger a la HC-06 de la alta tensión en el Arduino. Si deseas el diagrama del circuito para ver la configuración.
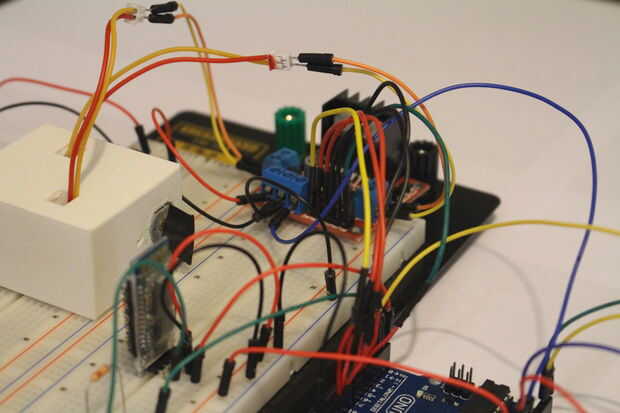
L298N controlador de Motor:
Este dispositivo se utiliza para controlar los dos motores DC con las señales PWM de Arduino. Los motores funcionarán en la dirección deseada de la aplicación y las lecturas de la MPU6050.
Arduino:
El Arduino Uno se utilizará como el cerebro de todo el sistema. El código está diseñado para reunir a toda la funcionalidad de los dispositivos y trabajar en una función ordenada.
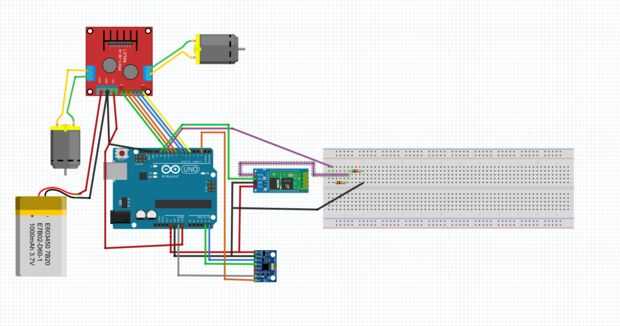
Voy a explicar la funcionalidad de mi circuito a continuación:
El smartphone utilizará la aplicación Joystick BlueTooth comandante para conectar con la HC-06 y enviar comandos de dirección al Arduino. El Arduino leerá estos valores de HC-06 y enviar una respuesta al conductor del motor L298N. El conductor del motor comenzará a girar las ruedas hacia adelante o hacia atrás, basado en la señal enviada. MPU6050 acelerómetro giroscopio se seguimiento de la posición de ángulo que está BB8. Si el ángulo alcanza más allá de un umbral, una vez que el sistema se detiene, el conductor del motor automáticamente encenderá los motores en la dirección necesaria para llegar a la posición vertical. Gire a la izquierda o derecha, el sistema funcionará similar a la de un tanque. Si usted quiere hacer, uno de los motores tendrá que reducir la velocidad para crear una dirección de giro.


.")










