Paso 2: StepperMotor.cpp

Ahora vamos a escribir la interfaz de clase.
Crear un archivo llamado StepperMotor.cpp y copia el código en las imágenes.
Veamos el constructor en la línea 4. Empezamos asignando los pines seleccionado por el usuario en el array de pines de entrada en las líneas 6 a 9. Esto hará más fácil a los números de pin en el algoritmo de manejo.
En la línea 12, recorra en iteración la matriz de entrada de pin y configurar cada pin a modo de salida.
En la línea 15, nosotros por defecto la duración paso a ms de 50.
En la línea 18 tenemos el setter de duración del paso. Esto es autoexplicativo.
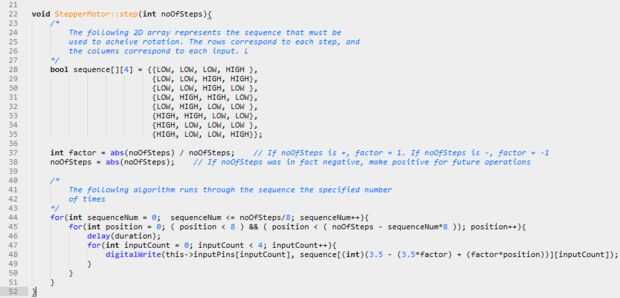
Ahora veamos el método de paso. Esto permite que el motor paso a paso a paso el número de veces que se pasa al método.
En la línea 28, definimos la secuencia de rotación utilizando una matriz 2d. Las filas representan un paso y las columnas representan los pines de salida.
En la línea 37 calculamos el factor, que va a ser + 1 o -1, dependiendo el signo del pasado número de pasos. Este valor se requiere en el algoritmo para dirigir la dirección de la iteración a través de la matriz de secuencia, es decir, para cambiar la dirección de la rotación.
En la línea 38, hacemos noOfSteps positiva, necesaria para el diseño.
En la línea 44, comenzamos un bucle que se ejecutará para cada inicio de una secuencia de rotación, es decir, al comienzo de cada 8 pasos.
En la línea 45, empezamos otro bucle que recorre en iteración las filas de la matriz de secuencia.
En la línea 46, nos demoramos como duración especifica.
En la línea 47, iterar a través de los números.
En la línea 48, escribimos la señal digital para el actual número pin.
Si el factor es negativo, las filas de la matriz de secuencia se acceden en la dirección opuesta en la línea 48 cuando escribimos a los pernos. 8 se resta por la cuenta de la fila... por lo que tenemos acceso desde abajo a arriba.





")







