Paso 15: Sistema de Stander

Herramientas:
Stripper de /wire herramienta Crimp
Multímetro
Soldadura hierro / soldadura
- y su elección de lo que se utilizar para soldar con (flujo, esponjas metálicas, etc...)
Partes:
Uno -> Tiva C Launchpad
4 -> 1 x 10 pernos de Rúbrica femenina (100mil espaciado)
Uno -> pins de header macho 1 x 40 (100mil espaciado)
Uno -> LM7805
Dos -> condensadores de .1uF
Dos -> HB25 Motor driver
Dos -> conjuntos de Motor y rueda
Uno -> protoboard
Uno -> potenciometro de 10 k
Uno -> interruptor SPST
Uno -> cable USB con el extremo macho del USB A (1.5' +)
Uno -> USB A hembra toma - o - cable con conector hembra USB A (5"+)
Dos -> 8" negro al menos 16 calibre
Uno -> 12" calibre del cable negro al menos 16
Dos -> 8" rojo por lo menos 16 calibre
Dos -> 4" rojo por lo menos 16 calibre
6 -> conectores de anillo grande
Siete -> conectores de anillo pequeño
Dos -> 4" 3 servo los cables de alambre con extremos macho y hembra
4 -> 3 cable de servo con extremos macho 2 (2 x 8", 2 x 18")
4 -> 3 cable de servo con los extremos femeninos 3 (2 x 10", 2 x 12")
Uno -> bobina de alambre fino flexible (usé 24 de cobre sólido calibre)
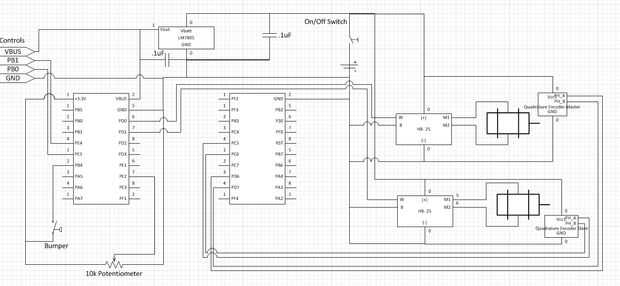
La forma más sencilla de hacer esto es hacer todas las conexiones a la plataforma TIVA de pasado. Para ello hacemos 2 conectores largo que conectarán el Launchpad TIVA a la protoboard. Mi conector tenía este pinout:
1 - 3, 3V
2 - PB0 - Bluetooth UART recibe
3 - PB1 - transmisión UART Bluetooth
Reciban controles de Stander - PE4 - 4 UART
5 - PE5 - Stander controla la transmisión de la UART
6 - PB4 - parachoques
7 - VBus - fuente de alimentación
8 - tierra - tierra
9 - PD0 - lado derecho (master) PWM
10 - PD1 - lado izquierdo (esclavo) PWM
11 - PE2 - potenciómetro
12 - PC5 - lado izquierdo (esclavo) fase A
13 - PC6 - lado izquierdo (esclavo) fase B
14 - PD6 – lado derecho (master) fase A
15 - PD7 - lado derecho (master) fase B
El número de la izquierda es qué fila de la protoboard cabe en. Siguiendo el esquema anterior conectar el protoboard junto con enchufar la Launchpad.You TIVA tendrá que hacer o conseguir un número de 3 cable de servo. Cualquier extremo que se conecta a la placa deberá terminar en un conector macho.
Encaminamiento de la energía
- Doble un extremo de cada uno de los 3 (8", 8" y 12") negro cables en un conector de anillo grande, esto se enganchan en la terminal de tierra de la batería
- Conecte el cable negro más corto en la línea de tierra de la placa
- Prensar conectores de anillo pequeño en los otros extremos de los cables negros de otros 2. Conectar a los terminales (-) en ambos de los controladores de motor HB-25
- Engarzar un conector anillo grande de alambre de 8" de rojo, este se conecta a la batería + 12V terminal
- Engarzar un conector pequeño anillo en el otro extremo del cable rojo corto, esto Conecte el interruptor SPST.
- Doble un extremo de un alambre de 4" de rojo y el cable de 8" rojo junto con un conector de anillo pequeño. Conectar ese anillo al segundo interruptor SPST terminal.
- El otro extremo de cada cable a un conector de anillo pequeño de la encrespadura y conectar (+) terminales en el HB-25.
- Engarce de un anillo pequeño capuchón un 4" rojo conéctelo al segundo terminal del interruptor SPST. (lo mismo que conectado al HB-25
- Conecte el otro extremo de ese cable de 4" a la entrada de pin (pin 1) del LM7805
- Prensar los conectores de presión grande afición a los conductores del motor. Cable rojo al lado rojo del conector. Hacer esto para ambos motores
- Prensar los conectores de presión manía grande a un extremo de 8" y 18" rojo y negro 12 cables de calibre.
- Prensar conectores de anillo pequeño anillo grande en te rojo y negro 8" y 18" 12 cables. Conecte los cables de 8" para el controlador del motor HB-25 en la parte superior de la caja. Rojo negro a M2 y M1.
- Ejecutar el 18" rojo y negro los cables a través del espacio de la parte inferior de la caja, conecte los conectores de anillo al HB-25 en la parte inferior de la caja (el que está que se sale cuando se abre la sección de electrónica)
Conexión de los periféricos
- Conecte los 2 10 "doble hembra terminó cables de servo a los codificadores de codificadores de lado izquierdo, marca que uno es fase y cual es fase B. rojo debe ser de 3, 3V, negro debe ser tierra y blanco debe ser A o B.
- Conecte los 2 cables de servo terminó hembra doble de 12" a los codificadores del lado derecho, de la marca que uno es fase y cual es fase B. (igual que en paso 3)
- Conecte los cables terminados macho doble con 1 fin de la fase A o fase B femenino termina y el otro en una ubicación conveniente en el protoboard. Utilice los cables cortos para el lado derecho y la longitud de los cables por el lado izquierdo
- Conecte los cables de 4" a los controladores de motor HB-25 y el otro extremo a un lugar conveniente en el protoboard
El puerto USB
Ya que no tengo un pinout estándar, hice mi propia para arriba.
- Corte el cable de USB para que tengas el USB A conector macho con una longitud de cable (1.5 '-2') es más que suficiente.
- Pele los cables y alambres y separar hacia fuera. Debe haber 4 cables aislados, esto es lo que conectamos a los controles de stander.
- Si tienes un cable USB con un conector hembra USB A hacer lo mismo con eso para separar los cables. Caso contrario si tienes un enchufe hembra de USB A independiente sólo utilice.
- Enchufe el extremo macho en el enchufe hembra.
- Utilice un multímetro para probar lo que los cables están conectados juntos en ambos extremos de los cables conectados. Conecte el extremo hembra en el protoboard para que las clavijas coincidan en ambos extremos como se muestra en el esquema a la izquierda.
Ahora que todos los periféricos tienen conexiones en la breadboard, necesita conectar las conexiones a las filas donde estarán las conexiones C TIVA. Esto es más fácil sin el conector de C TIVA enchufado.
La conexión de C TIVA
- Conseguir los alambres flexibles delgados corta 15, la misma longitud.
- uno de los extremos de cada cable en el extremo del perno de los encabezados femeninos donde cada pin de interés es la soldadura. (Véase lista)
- Los otros extremos de los cables cortos en orden a un jefe masculino de la soldadura.
")



")







