Paso 11: Añadir el código
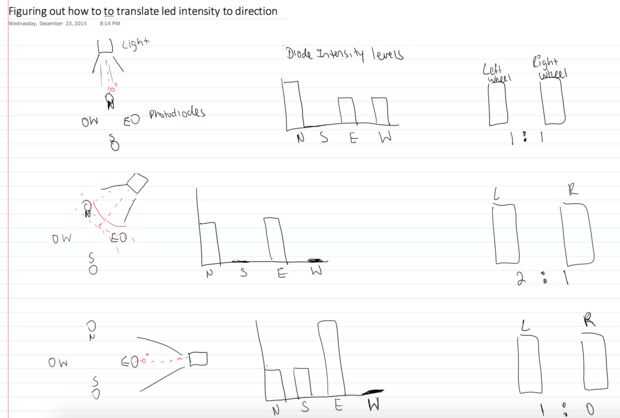
El algoritmo para determinar la dirección es bastante simple. Si el BitBeacon (circuito emisor de luz) es golpear el sensor del norte directamente, entonces la intensidad en el norte será el más alto, mientras que la intensidad en el oeste y este debe ser relativamente similar debido a la viga extensión (véase imagen). Como resultado, se moverá poco norte y tanto la izquierda y derecha motores se moverán a la misma velocidad así que poco va hacia adelante.
Si el BitBeacon es entre el norte y los sensores de este o el norte y los sensores del oeste, entonces la intensidad en el norte y este sensores deben ser sobre el mismo. Como resultado, poco debe moverse hacia el norte-este. Esto se logra moviendo que los motores izquierdos hacia adelante a una velocidad mayor que los motores de la derecha.
Si el BitBeacon está apuntando directamente hacia el sensor de este (o el sensor del oeste), entonces la intensidad en el sensor de este debe ser mucho mayor que el sensor del norte y la intensidad en el sensor del oeste debe ser cero. Como resultado, poco se moverá hacia el este. Esto se logra moviendo los motores izquierdos adelante y derecho atrás motores por lo poco se convertirá en una moneda de diez centavos.
Activamente estamos actualizando el código que se vienen muchos cambios. Adjunta es la versión estable actual para esta iteración, pero no dude en seguir el repositorio de GitHub para ver qué otras modificaciones que hacemos más adelante por el camino.
 COMO un jefe (gratis)")










")

