Paso 4: Circuito de controlador de Motor
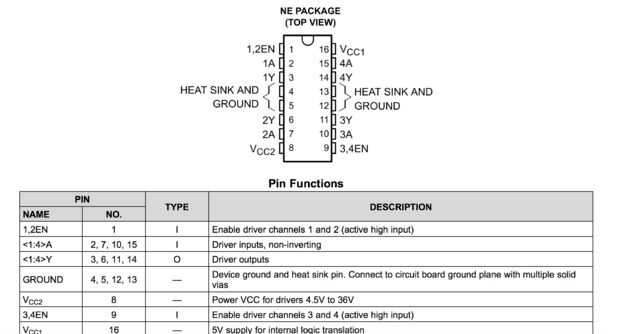
Utilizamos el SN754410 cuádruple medio-puente en H. Estos chicos son pin para reemplazos de pin para el popular puentes de H L293D, pero permiten mayor corriente (1 A en comparación con 0.6 A). Las conexiones de estos son bastante fáciles.
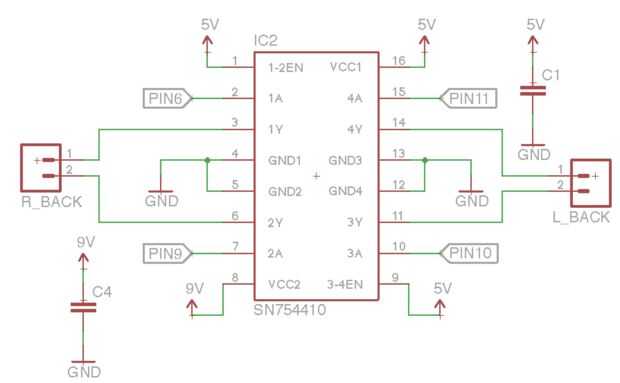
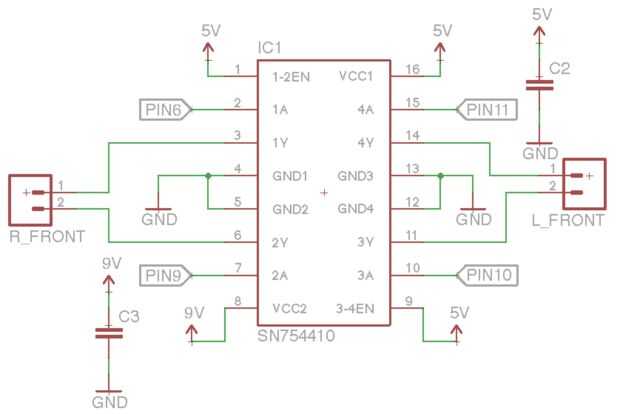
El chasis tiene 4 motores para cada 4 ruedas. Usamos 2 controladores de motor para controlar 4 motores (una sola SN754410 puede controlar 2 motores). Puente H uno controla la espalda izquierda motor y la parte trasera motor derecho. El otro puente H controla el motor izquierdo delantero y el motor derecho delantero. La única parte delicada es que estamos controlando el motor conductores en paralelo para que los motores de izquierda juntos y los motores derecho juntos.
Velocidad del motor es controlada mediante modulación de anchura de pulso de pines digitales del Arduino. PWM se explica más aquí.
 COMO un jefe (gratis)")










")

