Paso 5: Codificación y datos
Para leer los datos desde el sensor de eje de 9 que tendrá que obtener las bibliotecas desde el hub de CVS aquí:
https://github.com/Seeed-Studio/Grove_IMU_9DOF
Algunas indicaciones generales para configurar los sensores son:
La dirección de I2C por defecto es 0x68
Cada uno de los tipos de valor (giroscopio, acelerómetro y magnetómetro) se transmiten como sus propios enteros de 16 bits
Para encontrar el vector de cada valor en utilizar el teorema de Pitágoras dimensional 3 a encontrar los módulos (m = (x ^ 2 + y ^ 2 + z ^ 2) ^ 1/2)
Cosas a tener en cuenta:
Altitud barométrica necesitará ser calibrado en el post (no crudo), utilice los valores de la Junta de rodilla
Altitud GPS es inexacta de que un promedio de GPS y barométrica es recomendable si la calibración es desconocida
Datos del magnetómetro pueden ser sesgados por la electrónica (alternador, magnetos, más todo lo electrónico en el plano)
Este sensor es sólo para fines informativos y como usted puede notar en el video al principio del video no siempre es precisa
Voy a publicar un archivo de código fuente completo para este proyecto en la sección de "Aplicaciones" una vez que termine resolviendo los errores. Actualmente estos bugs son datos del sensor inexactos, archivos de texto al azar que se estrellan y corrupto. Creo que esto es debido a la codificación ineficiente y la gran cantidad de datos reunidos durante un vuelo.
Actualmente estoy trabajando para encontrar un equilibrio en la tasa de actualización del sensor entre la calidad y confiabilidad, ya que creo que mi tasa de registro está causando mis errores.
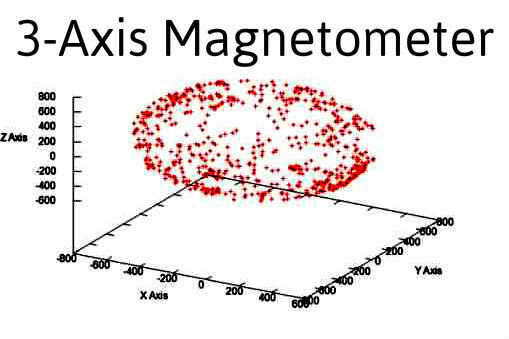
El sensor de 9 ejes también registra magnetismo x.y. y z del eje que puede rendir algunos resultados interesantes visualmente al graficar en 3 dimensiones (ver datos arriba). Nota: la gráfica es una "bola" porque el sensor detecta una cierta declinación magnética que se descompone en un vector cartesiano (X, Y, Z). Imaginar el vector como la aguja de una brújula que desde el origen hasta el punto
")


.")









