Resumen
Foto y vídeo documentación es esencial para muchos acontecimientos importantes
Quadcopter drones han demostrado coste eficiente en comparación con la película gigante grúa armas y helicópteros de gran escala, pero son extremadamente ruidosos sólo mantener una altitud constante. Quadcopters también tienen muy tiempos de vuelo limitado, que para algunos es sólo unos minutos.
Todo el código está disponible en https://github.com/H-4-N-5/Turtle-Blimp
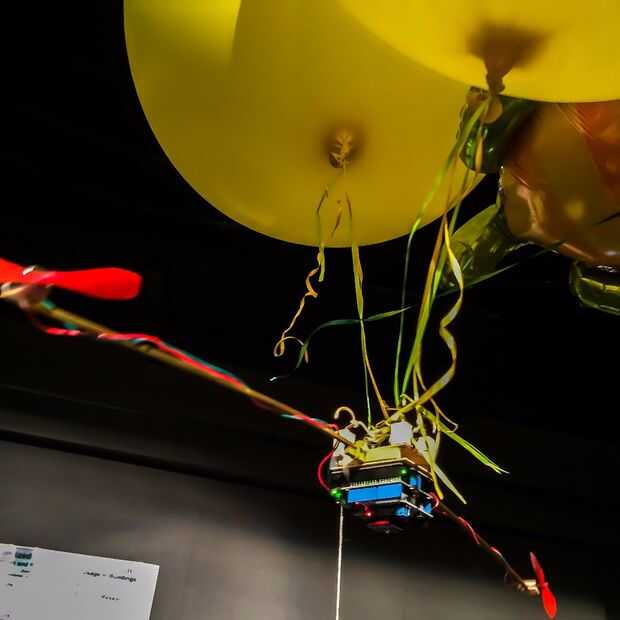
Para controlar el dirigible, leí por primera vez el valor de la rotación de cada uno de los potenciómetros. Enviar datos desde Arduino Mega a través de la radio Xbee conectado a él, a la Arduino Uno en la parte vuela de los dirigibles que también tiene un Xbee conectado. El Arduino Uno analiza estos valores recibidos y establece en consecuencia la izquierda correspondiente y velocidades de motores derecho.
Lista de piezas
Para el dirigible:
- Arduino Uno Rev 3
- Seeed Studio doble escudo Motor V2.
- Sainsmart Xbee shield
- XBEE serie uno
Para el Panel de Control remoto:
- Arduino Mega 2560
- Escudo de mega Ultimate (tiene varias secciones de encabezado de Xbee y un sniffer de microSD
- 2 potenciómetros
- 2 potenciómetro tapas/diales
- Pantalla LCD




")





")


