Paso 1: Hacer un Control remoto


Construcción y programación de un Control remoto para el dirigible
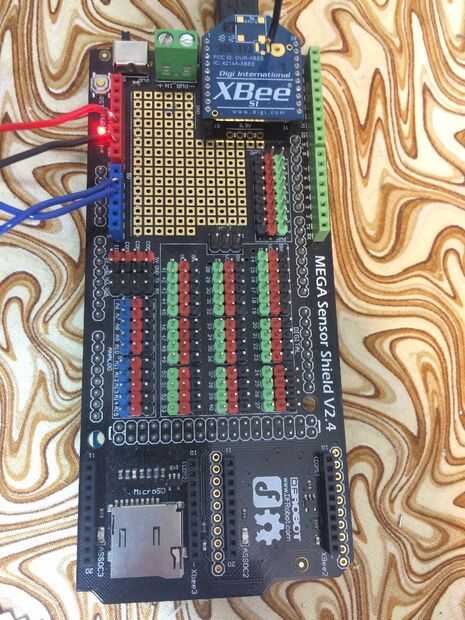
Usé mi Arduino Mega con un DFRobot Mega Sensor escudo V2.4, que tiene 3 pares de cabezales de Xbee.
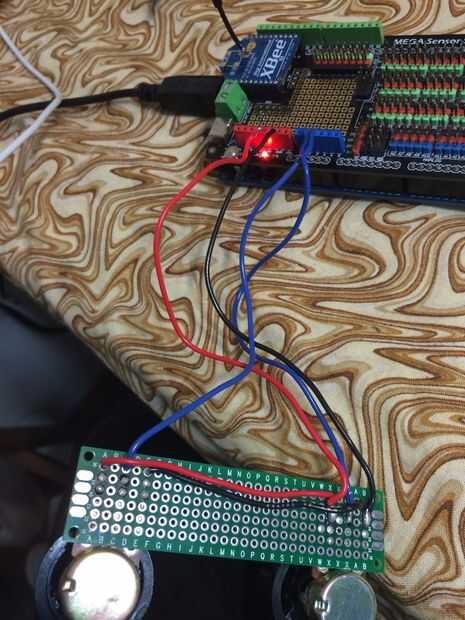
Tenga en cuenta que el Xbee no puede conectarse el protector del Sensor Mega al intentar cargar el código para el Arduino Mega o no funcionará. Simplemente subir el código sin el Xbee conectado, retire el cable USB, conectar el Xbee, luego vuelva a conectar la fuente de alimentación (cable USB). Obtuve 2 potenciómetros de ohmio de 10 K y algunos plásticos que encajan en ellos para indicar su posición de rotación marca. Los potenciómetros son conectados a 5V, Ground y análogo pernos A1 y A2. Rotación puede detectarse haciendo analogRead(pin_number). Había soldado los potenciómetros a un trozo de PCB, puesto que la conexión era no fiable utilizando un protoboard.
Código de Arduino:
int leftKnob = A1; // select the input pin for the potentiometer
int leftKnobValue = 0; // variable to store the value coming from the sensor
int rightKnob = A2; // select the input pin for the potentiometer
int rightKnobValue = 0; // variable to store the value coming from the sensor
void setup() { Serial.begin(9600);
}
void loop() { leftKnobValue = analogRead(leftKnob);
rightKnobValue = analogRead(rightKnob);
Serial.println(leftKnobValue);
Serial.println(rightKnobValue);
delay(50);
}




")





")


