Paso 3: Paso 3: conexión y las interacciones entre las partes
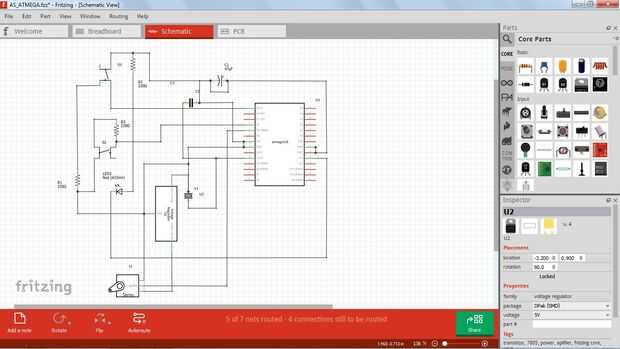
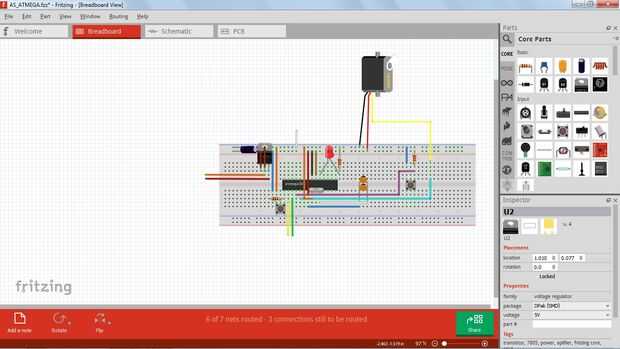
El motor servo se conecta al vivo, tierra y a la dc 3 º puerto de salida que es un PWM puerto (reloj) en el Arduino Uno. El receptor está conectado con el segundo puerto de Arduino y conectado a un resistor y vivo (5 volt salida de Arduino) en serie y luego a normalmente abierto puerto del receptor. El puerto común está conectado directamente a tierra. Luego por último el receptor está conectado a una fuente de alimentación de CC de 12 voltios













