Paso 3: Cableado y conexiones
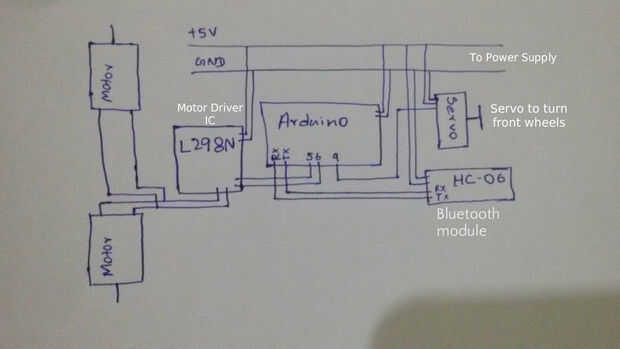
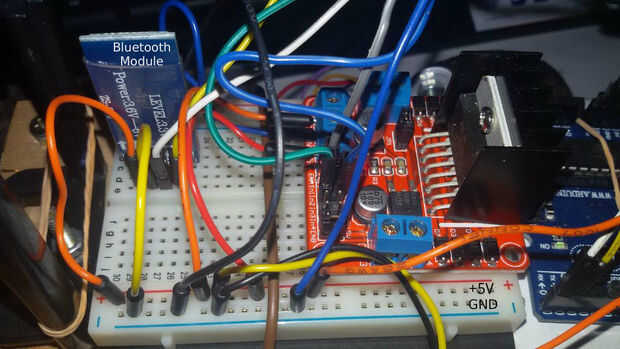
Usando un protoboard es la manera más fácil para este proyecto. Primero encienda los carriles de la energía de tu protoboard con la fuente de alimentación. Luego conecte el módulo de Bluetooth a la placa como en la imagen. Conecte la alimentación y pines GND en el riel de alimentación. Todos los pernos están marcados hay en el módulo de HC-06. Conecte el Bluetooth RX al TX del arduino y Bluetooth TX al RX del arduino.
Entonces el servo, Servo también es necesario poder hasta con la línea de 5V. Conecte respectivamente a la tren de potencia. entonces el pin restante del servo es la señal de arduino. conectar ese pin a pin 9 del arduino.
Necesita identificar los pines en el conductor del motor L298N IC. Son idénticos como los pasadores se mencionan allí en el tablero. tienes que conectar éste a la línea de alimentación. luego conecte los cables del motor a la potencia del conductor del motor. He conectado dos motores juntos. Si son conectarlos por separado a las dos salidas, tienes que cambiar un poco el código de arduino. Luego conecte los pines de señal de arduino para el conductor del motor. Conectar y a arduino pin 5 pin 6. (cuando tiene el coche, si va a sentido contrario, cambiar el pin 5 a 6 y 6 a 5)
Si se enciende los componentes y la placa de arduino desde diferentes fuentes de energía, tenga en cuenta para conectar todos los GNDs juntos.











")

