Paso 3: cableado
Pegar las breadboards al chasis como se muestra.
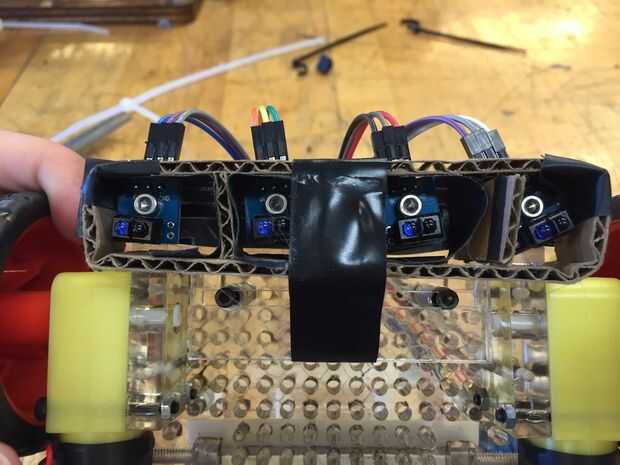
Conecte la línea de sensores para el sensor de monten y deslizarlas a lo largo de a espaciarlos aproximadamente uniformemente.
Nota: los sensores de línea pueden interferir mutuamente, por lo que hemos hecho un simple divisor de cartón para ellos.
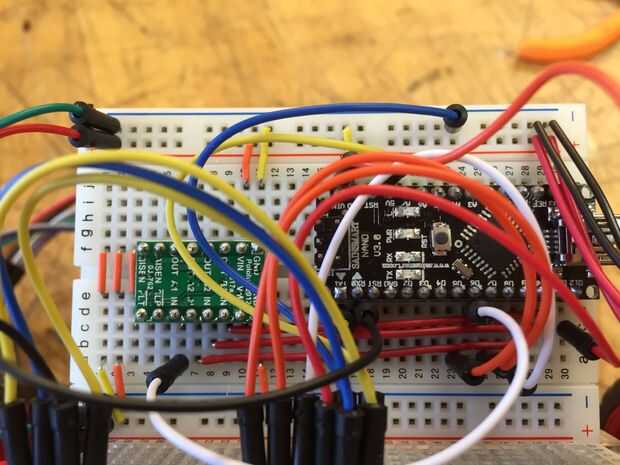
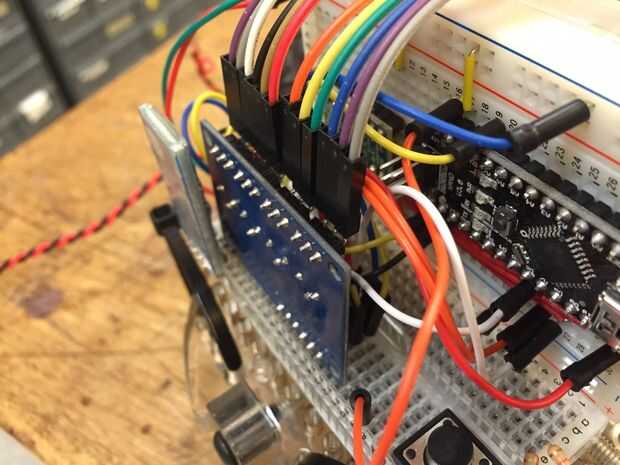
Visto anteriormente, es la instalación de cableado de la placa. Conectar lo siguiente:
- Arduino pin 5--línea Sensor D001
- Pin del Arduino 6--Motor A1 en
- Arduino pin 7--línea Sensor D002
- Arduino pin 8--línea Sensor D003
- Arduino pin 9 - A2 Motor en
- Arduino pin 10--Motor B1 en
- Arduino pin 11--Motor B2 en
- Arduino pin 12--línea Sensor D004
- Pin de 5v de Arduino--vcc Sensor de línea y Bluetooth
- Arduino gnd - gnd línea Sensor Bluetooth y 9v-
- Pin Tx del Arduino--pin Bluetooth Rx
- Pin Rx del Arduino--pin Tx Bluetooth
- Arduino Vin pin--9v +
- Motor pin Vin--9v +
- Motor fuera A1--izquierda Motor +
- Motor a A2--Motor izquierdo-
- Motor a B1--Motor derecho-
- Motor fuera B2--derecho Motor +
Nota: las dos baterías de 9v se conectan en paralelo
Una vez que todo está conectado, ajustar los sensores con los potenciómetros acoplados.

")


")








