Paso 3: Montaje del rover...

Siga las imágenes numeradas y el video corto de la orden de montaje (algunas cosas pueden ser diferentes dependiendo de su chasis...).
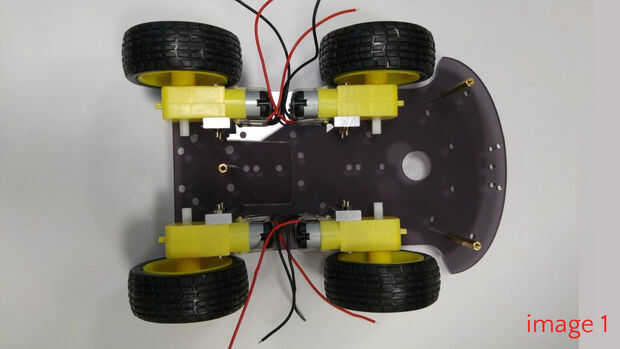
- Comience con los motores en el chasis y las ruedas (imagen 1).
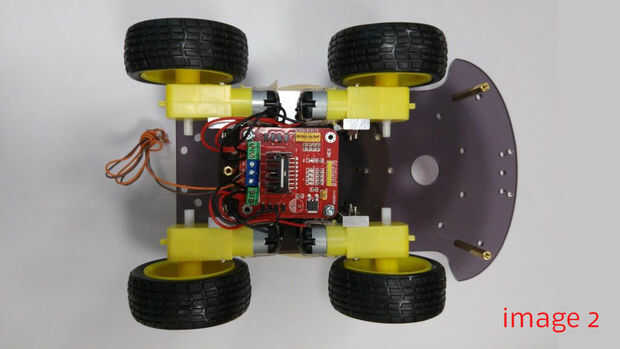
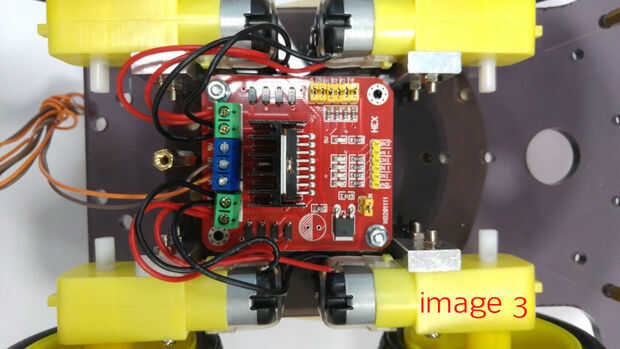
- Monte los motores L298 controlador de motor tablero y cable a él.
También añadir 2 cables para el tablero (imagen 2 y 3). - Un trozo de cable plano conectará la junta al Arduino, necesita sólo 6 cables pero dejé algunos otro gratis para uso futuro (tal vez luces o sensores de ultrasonidos...).
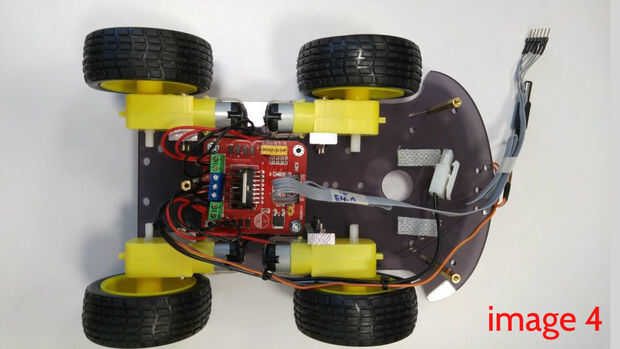
También de alambre del enchufe de gato, preste atención a la polaridad, el pin central es positivo (+ 11.1V de batería) (imagen 4).
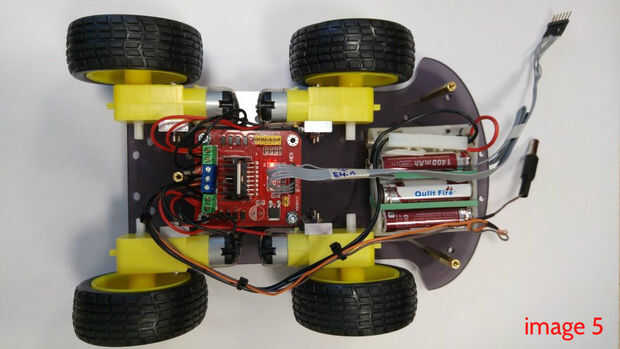
Si usted elige que una batería entonces puede ser una buena idea poner un conector entre la batería y el rover (imagen 5).
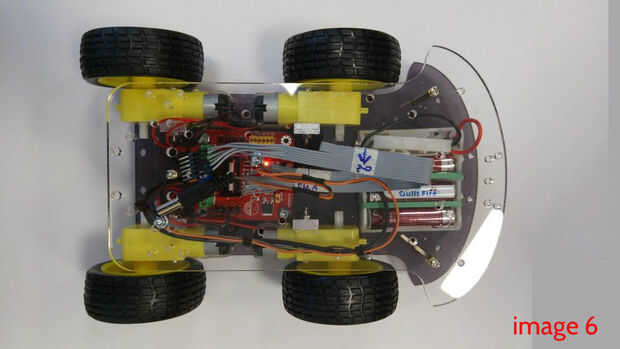
Lugar la parte superior de la rover... el cable plano y el conector pasa a través del orificio (imagen 6)
Monte el módulo de bluetooth con la resistencia mediante un trozo de cable plano (generalmente viene con el módulo). Corte el cable RXD (no el pin!) y la resistencia en serie con el cable de la soldadura.
Sello con un tubo termocontraíble (imagen 7).
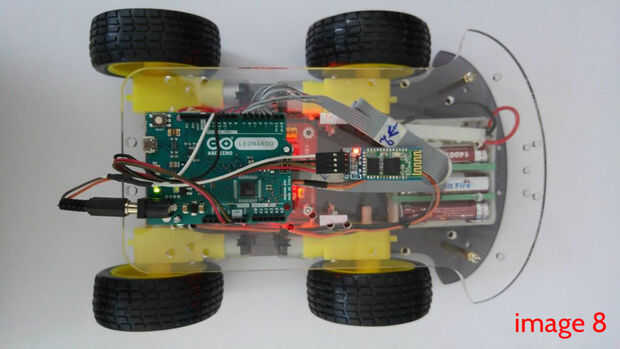
Coloque la placa Arduino y el módulo. Conecte el cable plano como en el esquema.
Fije el módulo de Bluetooth con un (muy) pequeño pedazo de cinta de doble cara.
Conecte al enchufe a Arduino (imagen 8).






")






