Paso 5: Diseñar el circuito
El diseño del circuito fue bastante simple. Desde un Arduino Uno no iba a caber en la caja con el sistema de engranaje, decidí soldar todo en una placa y sólo utilizar un ATMega328 sin el convertidor de usb a uart ATMega16U2 que está en Uno juntas.
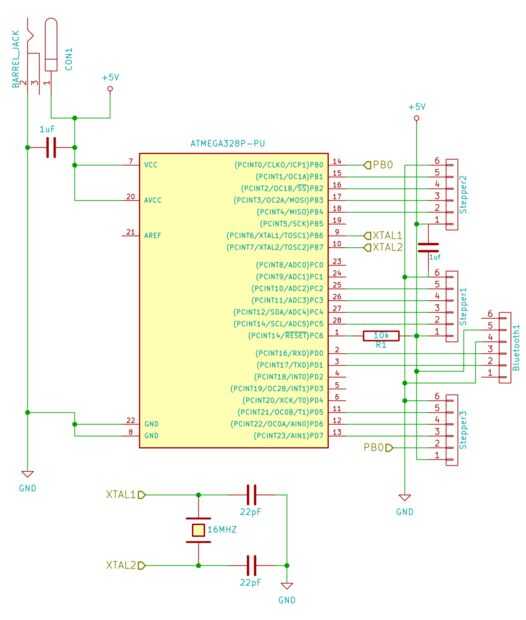
Hay cuatro partes principales en el esquema (que no sea el microcontrolador obvio): la alimentación, el oscilador de cristal, los controladores de motores paso a paso y el módulo de bluetooth.
Fuente de alimentación
La fuente de alimentación proviene de una fuente de alimentación de 5V 3A que he comprado fuera de eBay. Termina con un OD de 5,5 mm, tapón del cañón 2,1 mm ID, con la punta positiva. Así que la punta se conecta a la fuente de 5V y el anillo al suelo. También hay un condensador de desacoplamiento de 1uF para suavizar cualquier ruido de la fuente de alimentación. Observe que la fuente de 5V se conecta a VCC y AVCC y tierra está conectada a GND y AGND.
Oscilador de cristal
Usé un oscilador de cristal de 16MHz y 2 22 pF condensadores según la hoja de datos para la familia ATMegaXX8. Esto está conectada a los pines XTAL1 y XTAL2 en el microcontrolador.
Controladores de Motor paso a paso
Realmente, éstos pueden conectarse a las patas. Elegí estos porque hace para el diseño más compacto y sencillo cuando llega el momento de ponerlo todo en una placa de circuito.
Módulo de Bluetooth
TX de HC-05 está conectado con el microcontrolador RX y RX a TX. Esto es para que cualquier cosa enviada al módulo de bluetooth desde un dispositivo remoto se pasarán en el microcontrolador y vice verso. El pasador quedo desconectado por lo que no puede ser cualquier reconfiguración accidental de los ajustes en el módulo.
Notas
Coloqué una resistencia de pull-up 10 k en el pin de reset. Esto no debería ser necesario, pero no me imaginé que esto podría evitar que la off-oportunidad de que el pin de reset va poco más de 2.5us. No es probable, pero ahí está de todas formas.













