Paso 6: El chasis del Robot



Una vez que reciba el chasis del robot en el correo, podría notar que las instrucciones son en chino. Si eres como yo, usted podría ser incapaz de leer a chino. Hay videos en línea que usted podría mirar aprender a montar el chasis, pero vamos a ignorar a estos y hacer algunas modificaciones de nuestra propia. Montar el chasis como originalmente estaba previsto hará el cuerpo un poco demasiado alto de la tierra y hará más difícil para el sensor poder leer y seguir la línea.
Para este paso necesitarás:
- Su kit de chasis de la robusteza (ruedas y motores están incluidos)
- 1 lanzador de bolas de plástico
- Madera de Luan
- Sierra para cortar ingletes
- Probablemente algún papel de lija
- Tiras de comando
- Tornillos
- Regla
- Código postal lazos o cordeles
- Soldadura de hierro
- De la soldadura
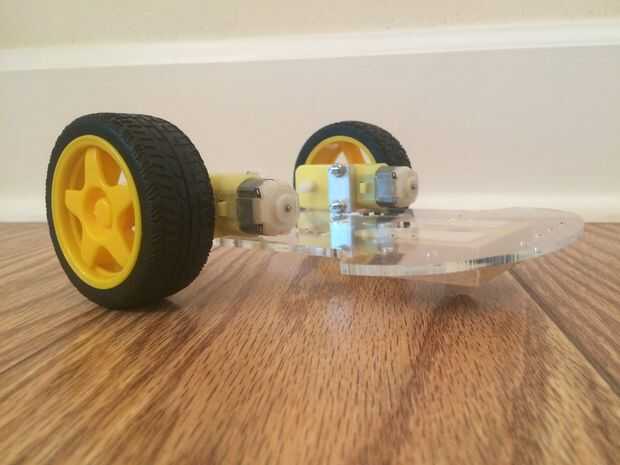
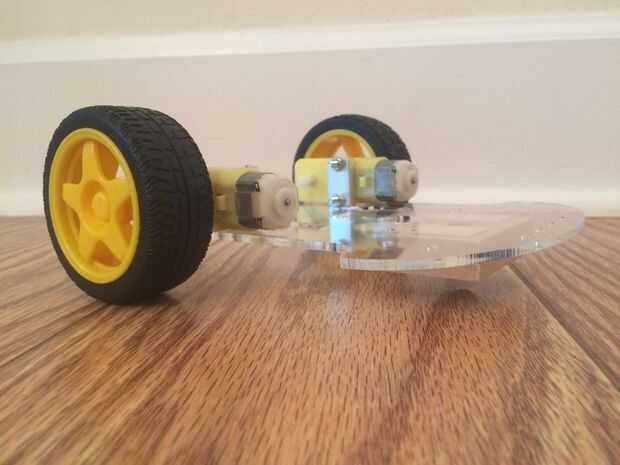
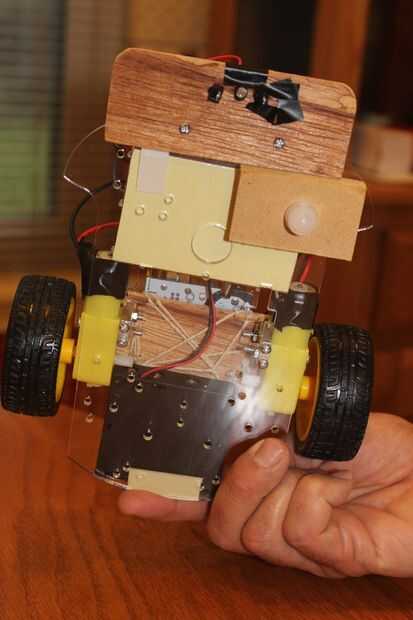
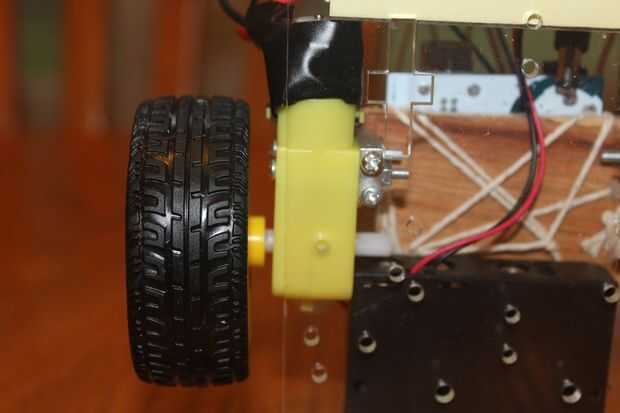
En primer lugar vamos a conectar los motores al chasis. Ahora voy a contradecir lo que dijo antes y vincularte a este video para que veáis cómo se unen los motores. A se une a la parte superior del chasis. El vídeo también muestra cómo montar las ruedas. Ta da! Termine con los motores y las ruedas.
Ahora vamos a construir una pequeña plataforma de madera para montar la placa Arduino. Medir la longitud de los motores en la parte plana superior de ellos y luego medir el ancho de los dos. Utilizar su sierra para cortar ingletes, corte un trozo de madera que es más o menos este tamaño. Utilice el comando Monte de tiras para sujetar la madera a los motores.
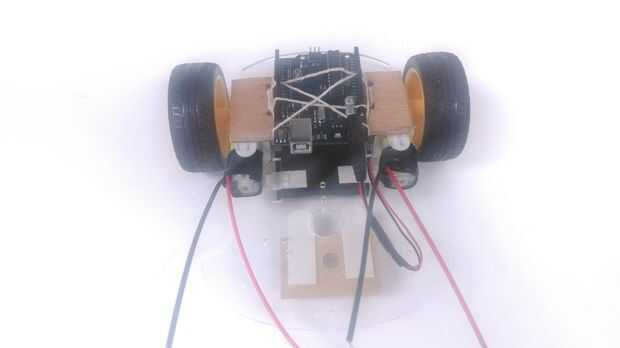
Puede utilizar cualquiera de los dos cordeles o zip lazos para asegurar tu placa Arduino a la nueva plataforma. Tenga en cuenta que puede mover de un tirón tu placa Arduino alrededor de modo que las salidas para el cable USB y la batería se enfrentan a la parte posterior.
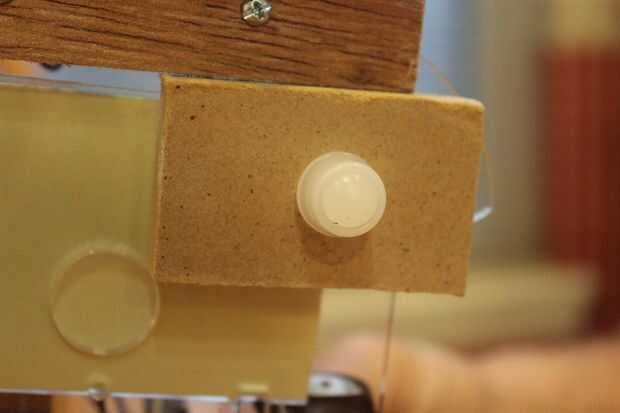
Corte otro pedazo pequeño de madera de la ruedecilla Bola de plástico. Si usas cinta aislante negra para tu pista como lo hice en mis pruebas iniciales, tendrá que adjuntar la ruedecilla bola plástica establecer centro. Si no está usando cinta aislante negra para su pista y plan sobre el uso de un marcador en su lugar, mantenga la ruedecilla Bola situado al frente y centro.
Corte otro pedazo pequeño de madera para el montaje de sus sensores. Se necesita tener tres agujeros pequeños perforados en él a los sensores a través del hilo de rosca. Esto se une al chasis con tornillos de tamaño similares a los que vinieron con el chasis del robot.
Para la colocación de la batería, puede utilizar una batería de 9 voltios, o utilizar el paquete de baterías 4 AA que viene con el kit de chasis del robot. Si utiliza el paquete de baterías 4 AA, necesita soldadura para el enchufe de la batería en tu placa de Arduino. El kit de chasis robot también vendrá con cables rojo y negro que se puede utilizar mientras se suelda. Simplemente corte el extremo de la clavija de la tarjeta de Ardunino que normalmente se conecta a una batería de 9 voltios y soldadura para el paquete de baterías AA 4.
La batería debe fijarse en la parte posterior del chasis, detrás de la placa Arduino. Algunas de mis fotos podrían mostrar por debajo del chasis del robot. Esto estaba antes en mi proceso de diseño, pero más tarde hizo cambios.
")








")



