Paso 1: chasis
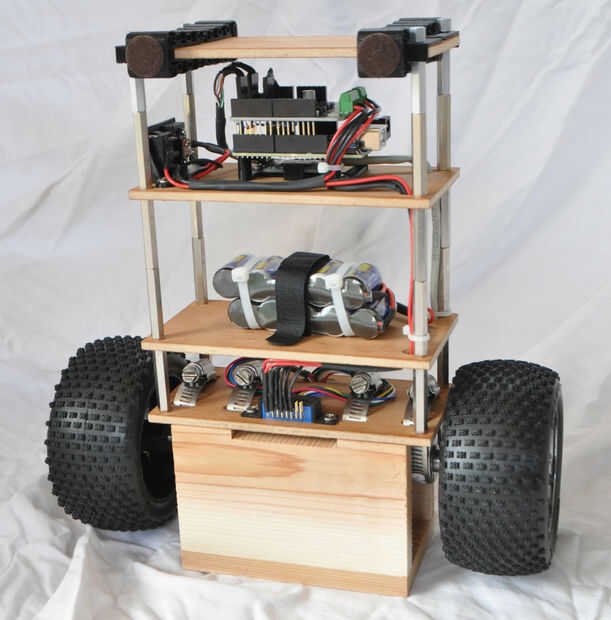


El chasis del robot sigue un diseño en niveles bastante común, usando el material disponible - madera contrachapada de 1/4 pulgada para cada nivel y soportes para conectar los niveles.
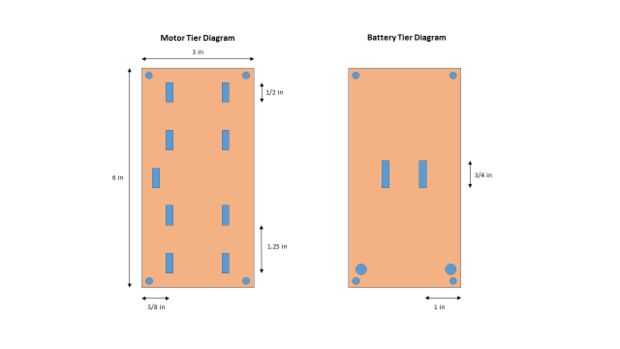
Montaje de robot comenzó con el nivel de motor, con las dimensiones indicadas en el diagrama. Usando un 1/4 bits y una guía de borde en el router router, cortaron 8 ranuras para montar los motores de DC, y se cortó una ranura 9 para los cables de control del motor. Esta última ranura fue tamaño para permitir que los conectores de cable del motor caber a través del orificio. Los agujeros fueron perforados en cada esquina, y contador hundido en la parte inferior de modo que el montaje Tornillo de cabeza sería al ras. Los motores están conectados en el nivel de ¼ madera contrachapada con abrazaderas de manguera. Para permitir un flexible pero robusto motor conexión eléctrica, 90 grados a través del conector del agujero fue utilizado, sujetado en el nivel de motor con un soporte personalizado.
El nivel de batería es similar, pero con sólo 2 ranuras para la batería correa de Velcro. Incluye la misma esquina, agujeros de montaje, pero además dos grandes agujeros fueron perforados para rutear los cables del motor hasta el nivel de electrónica. Para evitar el ruido inducido, los cables de potencia y control se dirigen en posts separados. Dos las son zip atados juntos y sujeta a la madera contrachapada con una cinta de Velcro que se encuentra en una tienda de hobby local.
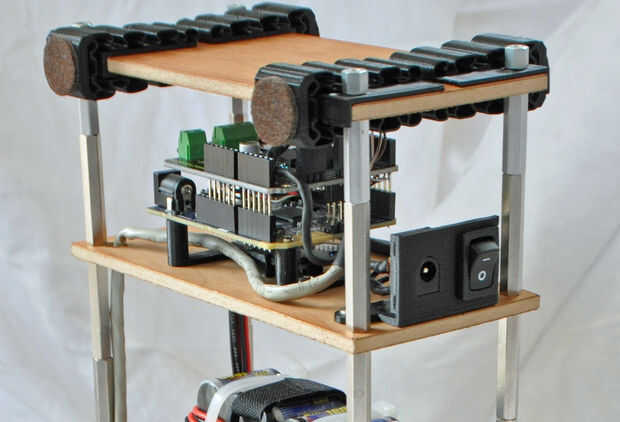
La preparación de nivel electrónica implicó el montaje mismo y los agujeros de gestión de cables, así como los orificios de montaje para la placa Arduino complejo y el módulo de interruptor de potencia de perforación. El nivel superior contiene solamente los 4 agujeros de montaje de la esquina. Completé el chasis por humidificadores de diseño para cada esquina, con construido en plástico y de fieltro, destinado a suavizar el impacto de una caída. Resulta que, las cataratas son parte integral del desarrollo de un robot de equilibrio.
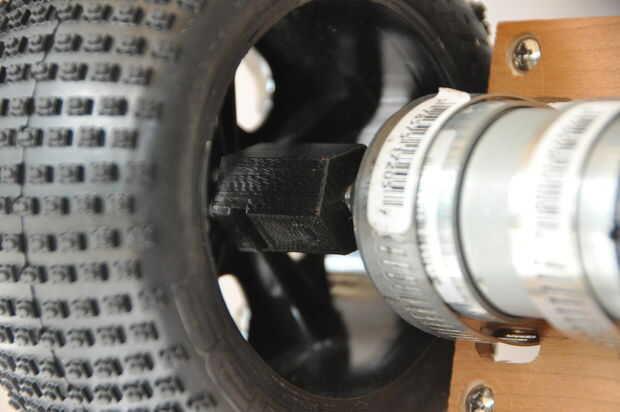
Para el paso final de la construcción, he utilizado neumáticos de camiones RC en el robot. He comprado un conjunto de una tienda de hobby local, pero son similares a estos en línea. El diseño del adaptador del eje de la rueda utiliza un tornillo 10-32 para sostener el adaptador en el eje del motor. Una ranura para una tuerca de 10-32 está incluida, permitiendo que la rueda para conectar directamente y un poco de grifo metal fue utilizado para agregar los hilos de rosca en el orificio del tornillo de ajuste después de que el adaptador se imprimió. .
A continuación se muestran que los archivos STL para la 3D impresión piezas. Utiliza Autodesk fusión 360 para el diseño, Cura para cortar y luego les imprimen usando un Metal Simple de PrintrBot PLA. Sólo complicado fue el tope, donde necesitaba usar 0,4 mm de espesor de cáscara para obtener el resultado deseado.
Piezas impresas 3D:
- Soporte de conector de nivel motor:
- Soporte de Arduino 101/BT:
- Módulo de conector del interruptor de potencia:
- Adaptador del motor del eje de la rueda:
- Topes (derecha, izquierda):












")
