Paso 2: cableado
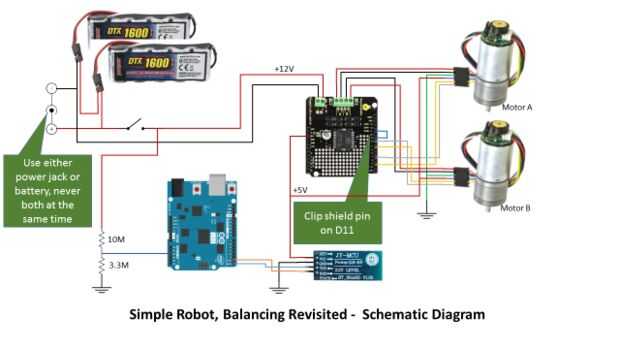
Las conexiones de cableado entre los subsistemas eléctrico del robot se muestran en el diagrama esquemático del cableado.
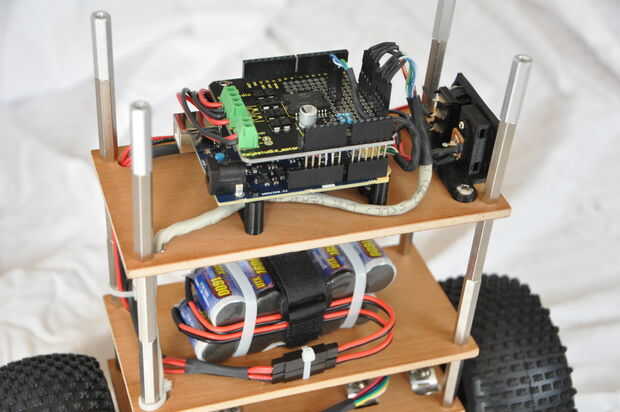
Para conectar los motores al blindaje del motor, utilicé alambre trenzado de calibre 20 para la energía y sólido cable CAT 5 para las conexiones del encoder. Hice uso extenso de conectores de dos postes y del encogimiento del calor, robusta pero flexibles conexiones.
Elegí el escudo del motor Keyestudio porque era barato y tenía una zona de pequeños proto. Un encabezado de una hilera de 4 x 1 fue utilizado para los conectores para el módulo Bluetooth y motor A los codificadores B. También pongo el divisor de voltaje, para convertir los 12V de la batería de 3.3V de la entrada, en el escudo del motor de la analógica Arduino 101. Las conexiones entre los resistentes, encabezados y pines de Arduino, se utilizaron los conductores de cable CAT 5.
Nota: no sé si hubo un error mi tablero de fabricación, o si estaban destinados a ser envían de esta forma, pero tuve que corta la lógica V a 3, 3V en el escudo del motor con las teclas en el tablero. Las pastillas estaban vacías como entregado, y esta conexión es necesario para el escudo del motor trabajar.
Hay un desajuste entre el escudo del motor y Arduino 101 en la asignación de pines del PWMB, el control de modulación de anchura de pulso para motor B. El escudo tiene en el pin D11 y Arduino 101 no admite PWM en D11. Para solucionar esto, le PWMB D9 en el sketch de Arduino 101 y agrega un jumper en el protector de motor entre D9 y D11. Como precaución adicional, recorta el pin D11 en el escudo del motor para evitar cualquier posible disputa entre D9 y D11 en Arduino 101.
Una entrada de jack de poder fue incluida para que el robot puede operarse con cable. Usé esto extensivamente en las primeras pruebas, carga de la batería no es necesario, y usted consigue una tensión de alimentación constante.
Nota: Cuando atado, utilicé un ladrillo de la energía 12V/5A como fuente de energía, que no está diseñada para cargar una batería. Un ladrillo de energía o una batería puede usarse como fuente de alimentación para el robot, pero nunca ambos al mismo tiempo. La batería debe cargarse con un cargador apropiado.












")
