
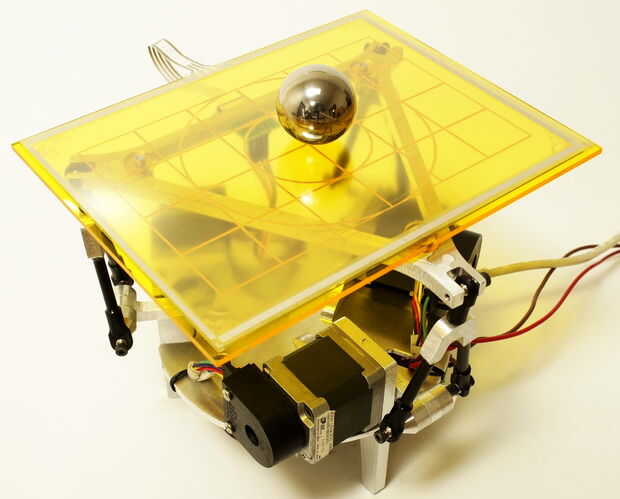

La bola en el problema de la placa consiste en una placa plana en la que una bola debe ubicarse. Bola de posicionamiento se logra a través de equilibrio inestable, donde cualquier pequeño cambio en el ángulo de la placa dará lugar a la aceleración continua de la bola hasta que sale la placa. Tal un presenta sistema interesante controla problemas como lazo cerrado control es necesario para bola estable posicionamiento en la placa.
Una buena aproximación para controlar el movimiento de la bola es disociar la x y y direcciones en la placa. Esto permite dos lazos de control independientes por separado. Un bucle controla la ubicación de x de la bola y otro controla la ubicación de y. Cada lazo de control para el x y y eje consta de dos partes; un lazo de control interno y un bucle externo. El lazo interno es responsable de los motores paso a paso en lazo cerrado para control del ángulo. Motor ángulo se obtiene de codificadores de la cuadratura en cada motor paso a paso. Un ángulo del sistema para los motores paso a paso se proporciona desde el bucle externo y la diferencia entre el ángulo del sistema y el ángulo medido impulsa la velocidad de angular motor paso a paso.
El bucle externo controla la posición de la bola real en la placa. La entrada a este bucle es bola deseado lugar y retroalimentación es medido bola. La ubicación de la bola se obtiene mediante una pantalla táctil resistente 4-wire en la que la bola rueda. La diferencia y la tasa de cambio de la diferencia entre el sistema y lugares medidos determina el ángulo de salida que se introduce en el bucle de control interno. El bucle de control exterior toma la forma de un controlador proporcional-derivado (PD), mientras que todo lo que se necesita para el bucle interior es un controlador proporcional.
La salida del sistema de control entero es la posición de la bola en la placa. La posición se controla mediante el ajuste de aceleración de la bola. Aceleración de la bola es una función del ángulo de la placa y ángulo de la placa es una función del ángulo de motor paso a paso. Usando la aproximación pequeña del ángulo, un pequeño cambio en motor ángulo de equilibrio debe dar lugar a un cambio linealmente relacionados con ángulo de placa y por lo tanto cambio en la aceleración de la bola. Esta aproximación rudimentaria funciona bastante bien para el control de la bola incluso en ángulos más grandes.










")


