Paso 5: Filtrado de datos
![]()
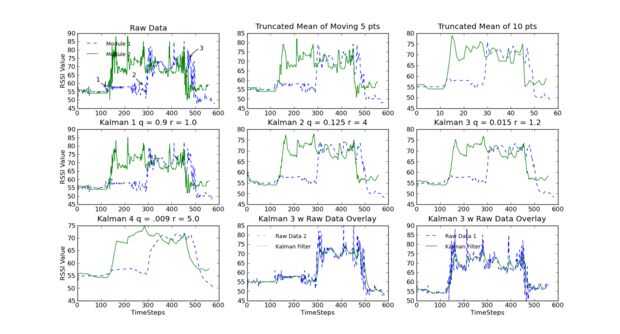
Wow! Tan así que hay tan muchas maneras de filtrar datos. El mundo es ruidoso y para extraer la información útil necesita filtrar el ruido. Nuestros datos pueden tener repentinos picos o valles. Que significa el si filtramos nuestros datos a través de un promedio o una mudanza nuestro medio tendría que tomar muchos muchos puntos para filtrar los picos un valles. Si nos fijamos en los datos probablemente podríamos
conjeturar en cuanto a lo que el valor
debe ser versus valor
medido . El
Filtro de Kalman puede matemáticamente nos ayuda a hacer precisamente eso. El filtro de Kalman calcula lo que un valor
debe basarse en la diferencia entre la medida y un valor
esperado .
El filtro de Kalman se ha utilizado en un montón de aplicaciones, desde sistemas de guiado de misiles para limpiar datos de acelerómetro.
Aquí están algunos ejemplos de filtros de Kalman y Arduinos:
Ejemplo del acelerómetro: http://www.youtube.com/watch?v=qtFyR1vLH2U
Otro ejemplo de Arduino de Kalman: http://www.starlino.com/imu_kalman_arduino.html
El Keyglove (Por favor fondo!)