Paso 1: partes


1 x Arduino Uno
1 x protector de conductor del motor de Sparkfun Ardumoto
1 x módem BlueSmirf Bluetooth de Sparkfun
1 x 150 de grado/s de giro
1 x 1,7 g acelerómetro
2 x kits de cabecera de Arduino
2 x terminales de tornillo
2 x 24:1 motorreductor
1 x conjunto de ruedas de 70 mm
2 x conectores JST
2 x baterías LiPo
1 x cargador de LiPo básica
3 x potenciómetros multivuelta de 10 k
1 interruptor de x SPST (Radioshack)
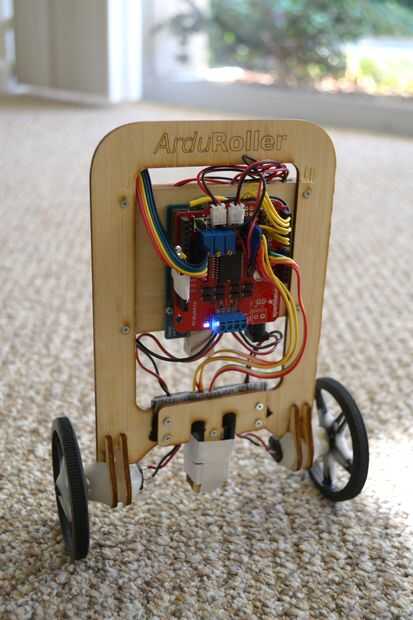
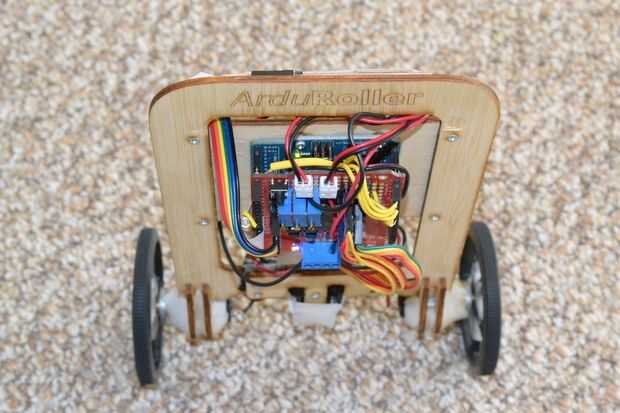
1 x chasis de bambú cortado a láser mediante Ponoko (enlace debería permitirle hacer uno de mi diseño compartido)
1 x LED
1 x interruptor de pulsador normalmente abierto
1 paquete x de Sugru para hacer los parachoques
Tornillos de máquina M2-04 surtidos (6mm - 16mm) (encontrados en Amazon)
M2-04 tuercas para tornillos de máquina de arriba
Clasificados encabezados de ruptura de rectas y de ángulo recto
Surtidos los cables puente
Cable de núcleo sólido
Trenzado de alambre de la base
Instamorph (también conocido como polimorfo) termoplástico bajo-derretir-punto
Notas:
Chasis: los motores encajaba bastante los montajes que hice tuve que lijar y reconstruir con instamorph. Creo que el paquete del sensor sufre de demasiada vibración, que podría haber sido mejor para hacerla más sólida y no sobresale como lo hace.
Acelerómetro: He intentado originalmente edificio el bot con sólo un acelerómetro para detección de inclinación y no giro. Resulta que es inviable, el acelerómetro es abrumado por la aceleración debido a los motores por lo que no puede utilizarse para estimar la inclinación mientras que el bot está acelerando. OTOH, usando sólo un girocompás haría el bot susceptibles a la deriva con el tiempo lo que realmente necesitas tanto.
Gyro: Usé un girocompás de la tarifa de 150 grados/s. De mirar la telemetría de mi bot, estoy seguro de a veces clip si usted da el bot un golpes por lo que si estaba empezar probablemente miraría un modelo 300 grados/s.
Ruedas: las ruedas son un poco frágiles, después de unos golpes me di cuenta de grietas alrededor del árbol para que los reforzados con instamorph.
Motores: También traté de 100: 1 motores de sparkfun pero no eran lo suficientemente rápidos. Las versiones de 24:1 tienen un montón de esfuerzo de torsión y velocidad.
Bluetooth: Yo uso el módem bluetooth para telemetría ahora pero también estoy planeando usarlo para control remoto desde mi teléfono Android. Si se omite entonces el robot seguirá funcionando pero ajuste será más difícil.
Ollas: He añadido 3 10 macetas de multi-vueltas de k al diseño para ajustar fácilmente los valores internos. Utilizando 3 podría haber sido exagerada ya que tienden a modificar sólo una cosa a la vez.
Instamorph: Cosas increíbles. Es un plástico duro, blanco (parecido a nilón sólido) a temperatura ambiente pero si usted calienta en agua que se convierte en un goo flexible que es muy fácil de trabajar con las manos hirviendo. Una pistola de calor es ideal para trabajar con él, lo que le permite fundir pequeñas áreas.



")









