Paso 3: Preparar el detector de transparencia improvisados
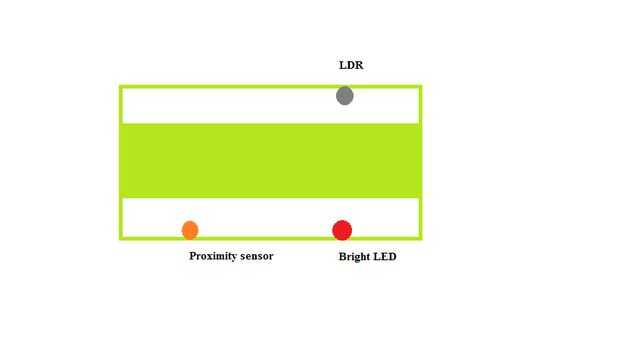
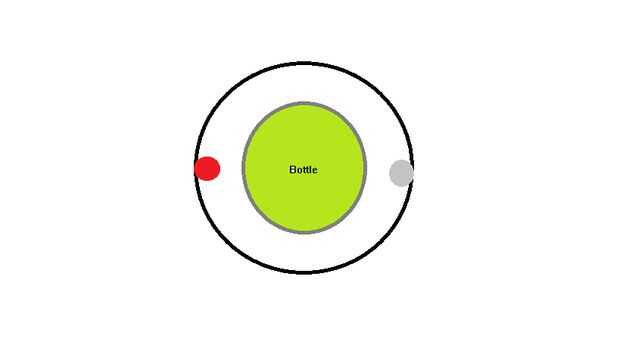
Esta es la parte donde el cubo de basura es realmente inteligente. Explotar el hecho de que mayoría de las botellas es transparente, o cerca de transparente. Utilizamos una combinación de un sensor de proximidad y un sensor de infrarrojos para detectar si el usuario tiene entrada o no de una botella transparente.
Fijamos el sensor de proximidad y la configuración de LDR-LED como se muestra en el esquema
El código utiliza una combinación de ambos para detectar si hay una botella transparente. Puesto que la botella está cerca, el sensor de proximidad da una salida de 0, y el LDR da una salida de 0 si el objeto insertado es transparente. Aplicamos algunos álgebra boleana para obtener una expresión que se convierte en verdadero sólo cuando es transparente el objeto insertado. Por lo tanto, existe una muy alta probabilidad de que el objeto aquí es una botella de plástico o vidrio.













