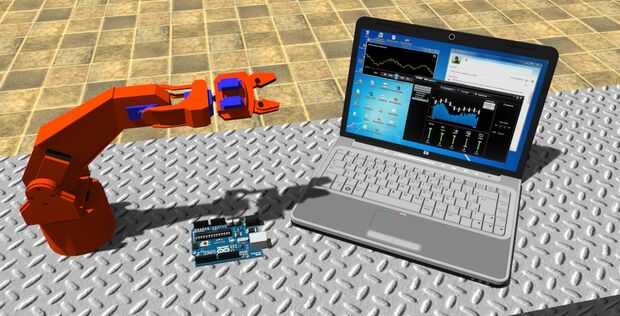
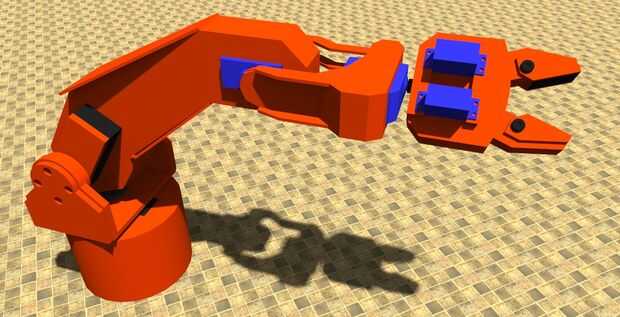



O robô apresentado na foto acima. Ele é capaz de girar em quatro eixos separados, rotação em torno da sua base, una rotação de 180 º é o antebraço, mirar una rotação hacer pulso é de 180 º e o giro da garra...
Todo controlado pelo Arduíno e potenciômetros...


![BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo](https://foto.askix.com/thumb/170x110/a/73/a73fe094730384e00961d770d1d63f61.jpg "BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo")
 cualquier coche de RC de 27 o 49 MHz en un coche robótico")









